
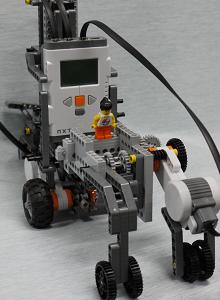
Fig.1 フロントビュー
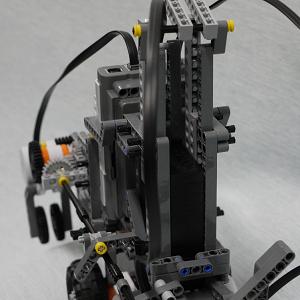
Fig.2 リアビュー
採用した戦略
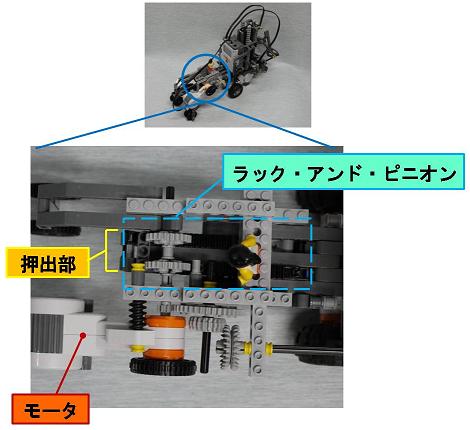
Fig.3 ラックアンドピニオン機構
ドミノを並べるという操作を考えると、重要な点として、
ドミノを設置する部分と設置位置まで移動させる部分が考えられる。
まず、ドミノを設置する部分に関してだが、ガイド機構を用いた。
マインドストームではミリ単位の精密な制御ができないため、
ドミノの拘束が強すぎると、力の偏りが出た場合に倒してしまう。
また、そもそもドミノは設置状態に近い形にすれば自立できるため、
比較的拘束の緩いケージングでドミノの向きだけを制御してやればよいと考えた。
こういった理由から今回はガイド機構を戦略として採用した。
次に、設置部分にドミノを移動させる部分に関してだが、ガイドを利用した直動機構を用いた。
移動には単純な操作のプッシングを行おうと考えた。プッシングで物体を任意の方向に動かすためにはFuliction Cone内に
物体の重心が存在しなければならないが、マインドストームの制御の不安定さを考慮して、
横にガイドを作り接触面積の広い押出部パーツを用いることで、確実な移動が出来るようにした。
また、直動機構の実現に関してだが、今回の機構では十数個の積み上げた中の一番下のドミノを送り出すため、
上からの力による摩擦に打ち勝つだけのパワーが必要になる。そのため、安定したパワーと挙動の実現を目的とし、
ラックアンドピニオン機構を用いた。モータの回転軸にピニオンギアを、押出部にラックギアをつけた。(Fig3)
製作したロボットの概要
今回のコンセプトとして、曲線的にドミノを並べるということを考えた。 そのために、今回の課題にはモータが3つという制限があるので、 移動に2自由度を用いると考えた場合、 ドミノを並べていくという作業は、1自由度で実現する必要がある。 実際、このドミノを並べるという作業は、同じ作業の繰り返しであるため、 1自由度で実現可能のはずである。 そこで、送りの機構とドミノを立てる機構を、ギアとシャフトを用いて連動 させることにより、一つのモータで実現した。 また、製作において、安定性・美しさを考慮し、重心を下部に置くことと、 可能な限り対称性を保つことを基本概念とした。
機構における工夫点
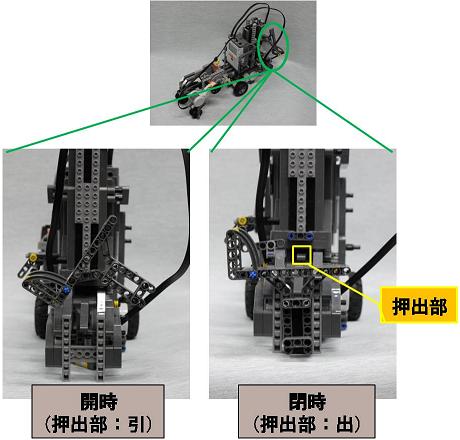
Fig.4 ドミノ設置機構
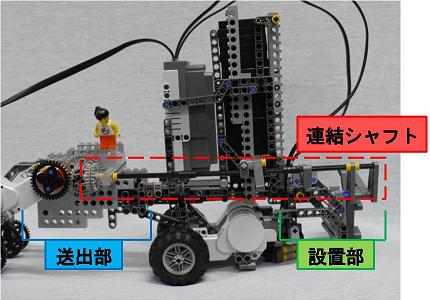
Fig.5 送出部と設置部の接続
ドミノ設置部では、3辺を囲んだガイドの開いた1辺を、
開閉式のパーツで閉じる機構を用いた。
開時には押出部が引き、閉時には押出部が出るように、
ギア部分と開閉パーツの角度を調整した。(Fig4)
1つの動力でドミノの送り出しと設置を可能とするため、
送出部と設置部を連結シャフトによって接続した。
送出部のモータの動力をクラウンギアによって連結シャフトに伝達し、
シャフトに直結された設置部のパーツが動くようにした。(Fig5)
ドミノ搭載部に関しては、単純に縦に20個のドミノを搭載する方式をとった。
ここで横からドミノを入れられるように開閉可能な機構となっている。(Fig2)
製作結果とその分析
完成品は、本番には意図したとおりに動作したのだが、
安定性に欠ける部分があった。
この理由として、停止時に揺れることが大きな原因としてあげられる。
これは、マインドストームの、モータが不安定であること、
およびレゴの剛性の低さに起因すると考えられる。
また、前後の連結シャフトが長すぎるために、
不安定性が増してしまった。
この点に関しては前後の機構位置の間隔を狭くするという改善の余地があったと思われる。
駆動タイヤの位置に関しても、タイヤの位置を後方(ドミノ設置部の近く)にすれば、
方向転換時に制御がしやすくなったのではないかと思われる。
今回、ドミノ設置部のガイドの後ろ側だけを開閉式にする方式を用いたが、
実際にドミノを並べてみると、
本体の不安定性、移動制御の難しさから、ガイドの横部分にドミノがぶつかってしまい、
ドミノ並べに支障が出てしまうことがあった。
このことから、ガイドの横部分も開閉式にすれば、設置後の移動方向の自由度が増し、
また本体の不安定性に左右されずに、
ドミノを設置できるすることが可能となったと考えられる。
感想
苦労した点として、
・どのように、モータ1つで2つの機構を動かすかということを考えたこと。
・レゴのパーツは剛性がやや低く、多くの個所でゆがみが出て補強が必要になったこと。
・パーツを固定するのに、半マス分ずれてしまったりして、思った通りに固定できないことが多かったこと。
・ギアの大きさなど、思った大きさのパーツがなかったこと。
・モータはパワー制御しかできないので、速度制御はギア比などを利用するしかなかったこと。
感想
・考えたものを実際にある部品で実現することが思っていたよりも難しいのだと実感した。
・作ってみるとうまくいかないことも多く、機構の変更を繰り返したことが大変だったが、面白かった。
・1つのモータで2つの機構ということを実現できて、満足。
・自分たちで考えたものがちゃんと動くようにするのが大変だったが、楽しかった。