
採用した戦略
今回のレギュレーション及び講義内容を加味して戦略の選択をした。
作業台と障害物の間の隙間が狭かったので、単純なPushingでは搬送しているドミノが横からもれて作業台の外に落下してしまうことが懸念された。また、ハンドを作って把握するにはモーターが2個と限られているため厳しいこと、フォーム、フォースクロージャなどを用いても自由に動く20個ものドミノの運搬を考えると制御が難しいと考えた。
そこで、当初は、Fig.1のように20個のドミノを一度に、何らかの台上に持ち上げて搬送するために、障害物を利用して薄い板の上にドミノをすくい上げ、上に載せたまま目的地に運ぶ戦略をとった。しかし、すべてのドミノを確実にすくい上げるのは困難であったため、Fig.2に示すように作業台の段差を利用することを考えた。つまり、作業台の外にロボットと糸でつながれた板を設置しておき、作業台からドミノをバンパで押し出して、板の上に全て載せる。その後、板が作業台と床の段差に引っかからない高さまで糸を引き上げ、ゴール地点まで運ぶ戦略に変更した。
作業台と障害物の間の隙間が狭かったので、単純なPushingでは搬送しているドミノが横からもれて作業台の外に落下してしまうことが懸念された。また、ハンドを作って把握するにはモーターが2個と限られているため厳しいこと、フォーム、フォースクロージャなどを用いても自由に動く20個ものドミノの運搬を考えると制御が難しいと考えた。
そこで、当初は、Fig.1のように20個のドミノを一度に、何らかの台上に持ち上げて搬送するために、障害物を利用して薄い板の上にドミノをすくい上げ、上に載せたまま目的地に運ぶ戦略をとった。しかし、すべてのドミノを確実にすくい上げるのは困難であったため、Fig.2に示すように作業台の段差を利用することを考えた。つまり、作業台の外にロボットと糸でつながれた板を設置しておき、作業台からドミノをバンパで押し出して、板の上に全て載せる。その後、板が作業台と床の段差に引っかからない高さまで糸を引き上げ、ゴール地点まで運ぶ戦略に変更した。
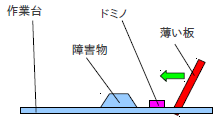
Fig.1
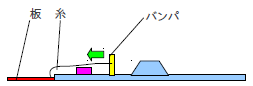
Fig.2
製作したロボットの概要
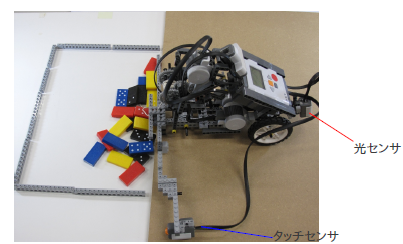
Fig.3
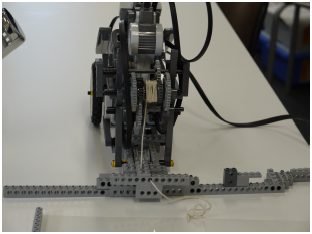
Fig.4
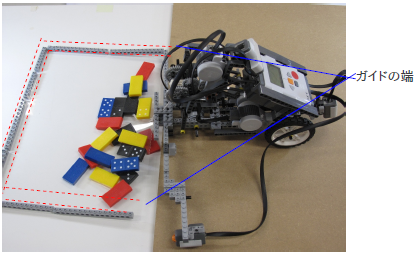
Fig.5
Fig.3,Fig.5に製作したロボットの概要を示す。Fig.3のようにドミノをロボット前方に取り付けたバンパによって押し出し、作業台に載せる。その際、作業台の端にロボットが到達したことは、Fig.3に示したタッチセンサが、作業台に取り付けた壁に衝突して反応することで検知できるようになっている。タッチセンサが反応すると、Fig.4で示した歯車を用いた機構で糸を巻き取り、板が作業台を乗り越えるのに十分な高さまで板を引き上げる。(Fig.5)その後、ロボットを後退させ、ゴールに設置されたライントレース用のテープをFig.3で示した光センサーで読み取ると、停止してゴールとなる。
機構における工夫点
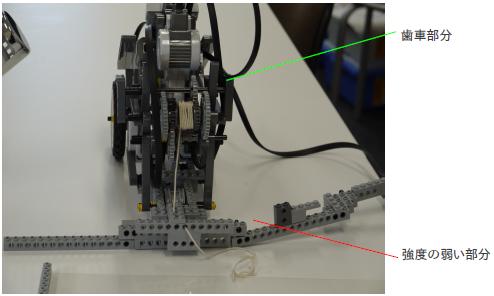
Fig.6
機構における工夫点の1つが、Fig.6に示すバンパの強度である。作業台に対し平行な方向はドミノを押すのに十分な強度を持たせたが、垂直な方向には、板がバンパに引っかかってもバンパを破壊して板が十分な高さに到達できることを優先できるようにした。
また、タイヤは使用できるうちで最大のものを採用し、速度を増すとともに、作業台中央の障害を容易に乗り越えられるよう工夫した。
また、糸を巻取るための歯車部分(Fig.6)は、ドミノ20個を巻き取るのに十分なトルクを出すためにいくつもの平歯車を組み合わせて減速してある。
また、タイヤは使用できるうちで最大のものを採用し、速度を増すとともに、作業台中央の障害を容易に乗り越えられるよう工夫した。
また、糸を巻取るための歯車部分(Fig.6)は、ドミノ20個を巻き取るのに十分なトルクを出すためにいくつもの平歯車を組み合わせて減速してある。
製作結果とその分析
製作期間を通じて、おおよそ自らが望むロボットは作成できたと思う。
しかし、改善すべきことも多くあったので、反省として、2点を挙げる。
まず、タッチセンサの取り付け位置についてである。Fig.5,Fig.7で示すように、現状ではタッチセンサはバンパの端に取り付けてある。しかし、剛性が弱まっているためにタッチセンサ反応用の壁に衝突した際、バンパがたわんでしまい、センサが上手く反応しない場合があった。よって、改善案としては、Fig.9のように壁を橋状に設置し(橋のように下に空間を儲けるのはドミノが通れるようにするため)、Fig.8のようにセンサをバンパ中央に取り付けることでより反応しやすくすることが挙げられる。
しかし、改善すべきことも多くあったので、反省として、2点を挙げる。
まず、タッチセンサの取り付け位置についてである。Fig.5,Fig.7で示すように、現状ではタッチセンサはバンパの端に取り付けてある。しかし、剛性が弱まっているためにタッチセンサ反応用の壁に衝突した際、バンパがたわんでしまい、センサが上手く反応しない場合があった。よって、改善案としては、Fig.9のように壁を橋状に設置し(橋のように下に空間を儲けるのはドミノが通れるようにするため)、Fig.8のようにセンサをバンパ中央に取り付けることでより反応しやすくすることが挙げられる。
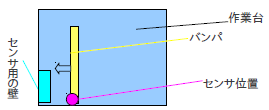
Fig.7
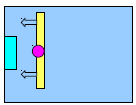
Fig.8
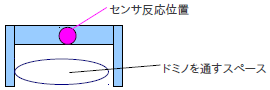
Fig.9
次に、Fig.5において赤色の点線で囲んだ板上のガイドの取り付けについてである。Fig.5に示したガイドの端にFig.10のようにバンパが当たってしまい、作業台との間に隙間ができてそこからドミノが落ちてしまい、20個全てを搬送できないことがことがあった。改善案としては、Fig.11のようにガイドを短くし、バンパが当たらないようガイドを設置することが挙げられる。
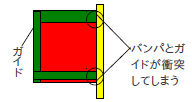
Fig.10
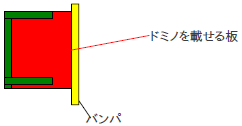
Fig.11
感想
発表会までに製作が終わるかというプレッシャーとの戦いであったが、無事作り終えることができて安心した。
何度も実験と試作を繰り返し、試行錯誤して改良を加えていくという経験は今後の研究にも生かすことができると思う。
戦略も発表前日での変更だったが、結果的に良い方向に向かうことができたので良かった。
2個しかないモータを使って可動部をどのように設計していくかに苦労した。また、限られたパーツでギアを上手く組み合わせて、ロボット全体の強度を保っていくのも大変であった。
様々考えられる戦略の中から適切と思われるものを選択し、目的を達成するために全て自分の力でロボットを製作して発表するのは良い経験になったと思う。また、全体を通じて楽しくゼミを受けることができた。担当の先生、先輩方も丁寧に指導してくださり、ロボットのマニュピュレーションについての知識だけでなく、多くのことを学ぶことができた。
何度も実験と試作を繰り返し、試行錯誤して改良を加えていくという経験は今後の研究にも生かすことができると思う。
戦略も発表前日での変更だったが、結果的に良い方向に向かうことができたので良かった。
2個しかないモータを使って可動部をどのように設計していくかに苦労した。また、限られたパーツでギアを上手く組み合わせて、ロボット全体の強度を保っていくのも大変であった。
様々考えられる戦略の中から適切と思われるものを選択し、目的を達成するために全て自分の力でロボットを製作して発表するのは良い経験になったと思う。また、全体を通じて楽しくゼミを受けることができた。担当の先生、先輩方も丁寧に指導してくださり、ロボットのマニュピュレーションについての知識だけでなく、多くのことを学ぶことができた。