
採用した戦略
「美しく瓦礫を運ぶ」というテーマに対して、私は2通りの方針があると考えた。1つは一瞬にしてたくさんの瓦礫を運搬する、もう一つは1つの瓦礫を複雑な機構でもちあげ運搬する方法だ。今回、私は前者を選択し、3秒以内に運搬し終えることを目標とした。
直線的に動くのが一番速いと考え、3台のロボットを準備した。まず2台が瓦礫のあるサークルの左右から中央へ進み、瓦礫を中央のラインに寄せる。そして、もう1台が中央のラインを駆け抜け、車内に瓦礫を収容し、障害物を乗り越え、反対側のサークルで止まるという流れである。
製作したロボットの概要
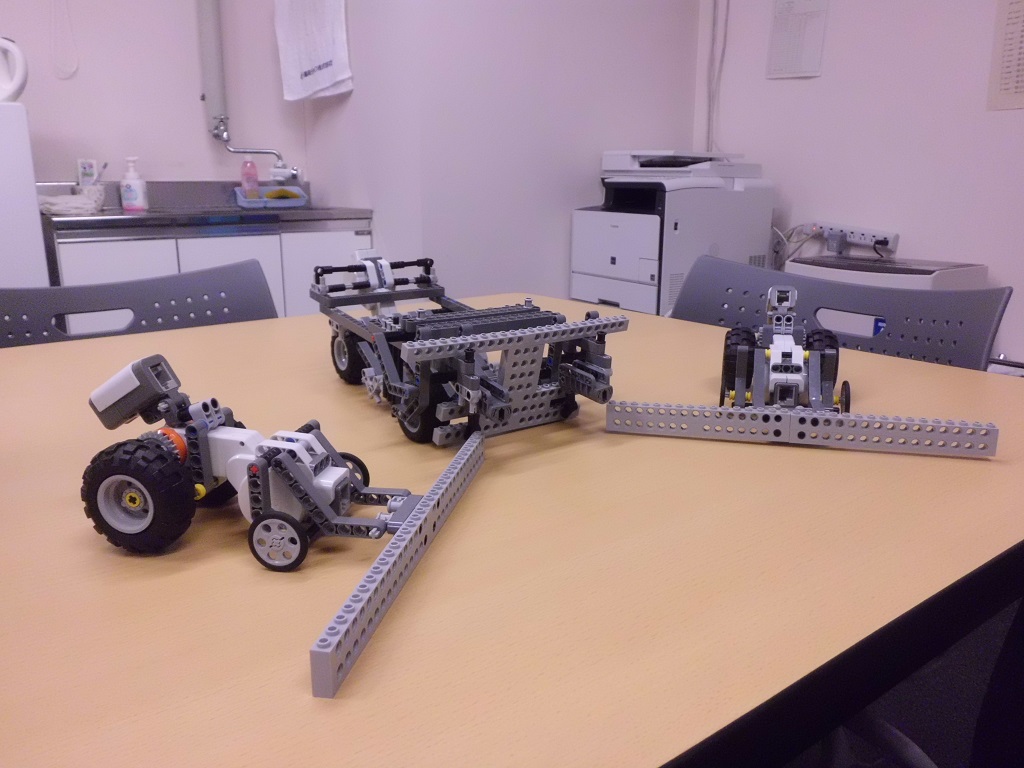
今回、発進と停止はすべてソフトウェア上のタイマーで行った。センサでスイッチングすれば、センサの分だけ車体が重くなるからである。3機とも直線運動しかしないので、モータは1台ずつ搭載している。また、加速度を上げるため、ある程度剛性を犠牲にして車体を軽くすることを優先している。
機構における工夫点
・瓦礫を押し出すロボットについて
無駄を一切省き、加速度が大きくなるように軽い車体にした。先頭についている瓦礫を押すアームは地面に非接触になるように、角度を調整してある(Fig2)。 アームが重くて後輪が浮くのを防ぐための重りとして、後部にセンサを取り付けたが、丁度よい重さで見た目も気に入っている。
・瓦礫を運ぶロボットについて
瓦礫を収納したまま障害物を、スピードを落とさずに乗り越えるのが課題だった。解決策として、車内の壁を回転可能にし、乗り越えるときに瓦礫がこぼれないようにする横壁も上下に動くようにした(Fig3)。 勢いよく障害物を乗り越えるようになった分、車体が跳ねて中の瓦礫が暴れるため、障害物を乗り越えるときにシャッターをおろす機構をつくった。障害物にぶつかるとトリガーが引かれて(Fig4)、ストッパーが外れてシャッターが落ちる(Fig5)。このとき、シャッターは地面および前輪に非接触になるように調整してある。
無駄を一切省き、加速度が大きくなるように軽い車体にした。先頭についている瓦礫を押すアームは地面に非接触になるように、角度を調整してある(Fig2)。 アームが重くて後輪が浮くのを防ぐための重りとして、後部にセンサを取り付けたが、丁度よい重さで見た目も気に入っている。
・瓦礫を運ぶロボットについて
瓦礫を収納したまま障害物を、スピードを落とさずに乗り越えるのが課題だった。解決策として、車内の壁を回転可能にし、乗り越えるときに瓦礫がこぼれないようにする横壁も上下に動くようにした(Fig3)。 勢いよく障害物を乗り越えるようになった分、車体が跳ねて中の瓦礫が暴れるため、障害物を乗り越えるときにシャッターをおろす機構をつくった。障害物にぶつかるとトリガーが引かれて(Fig4)、ストッパーが外れてシャッターが落ちる(Fig5)。このとき、シャッターは地面および前輪に非接触になるように調整してある。
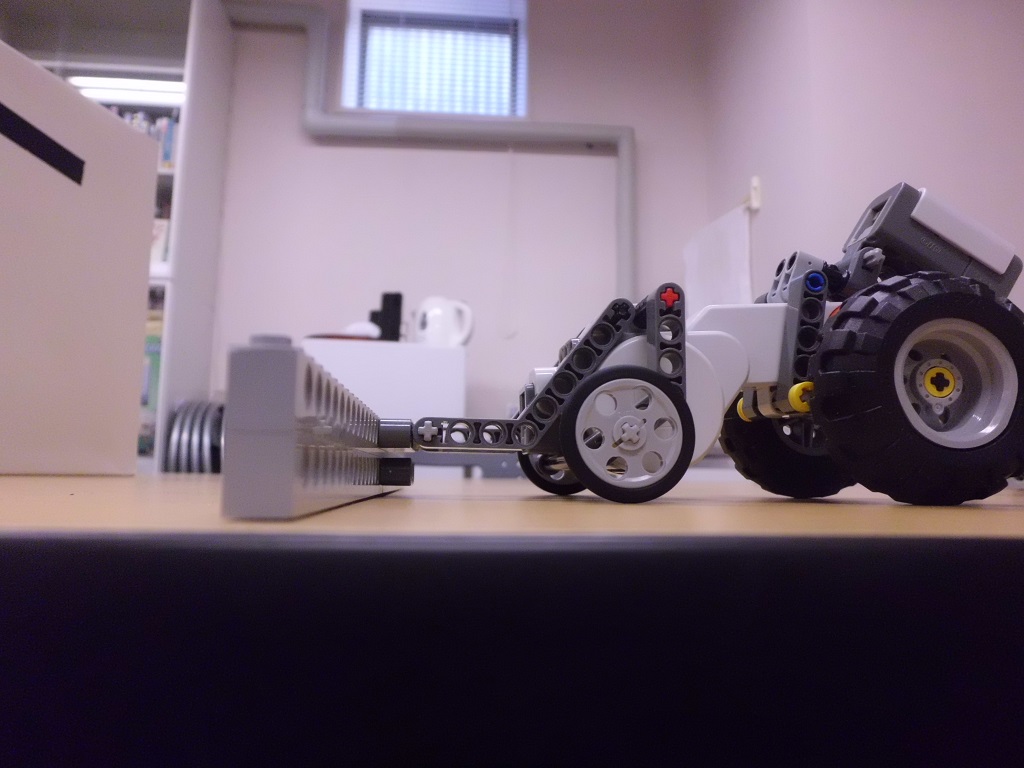
Fig. 2
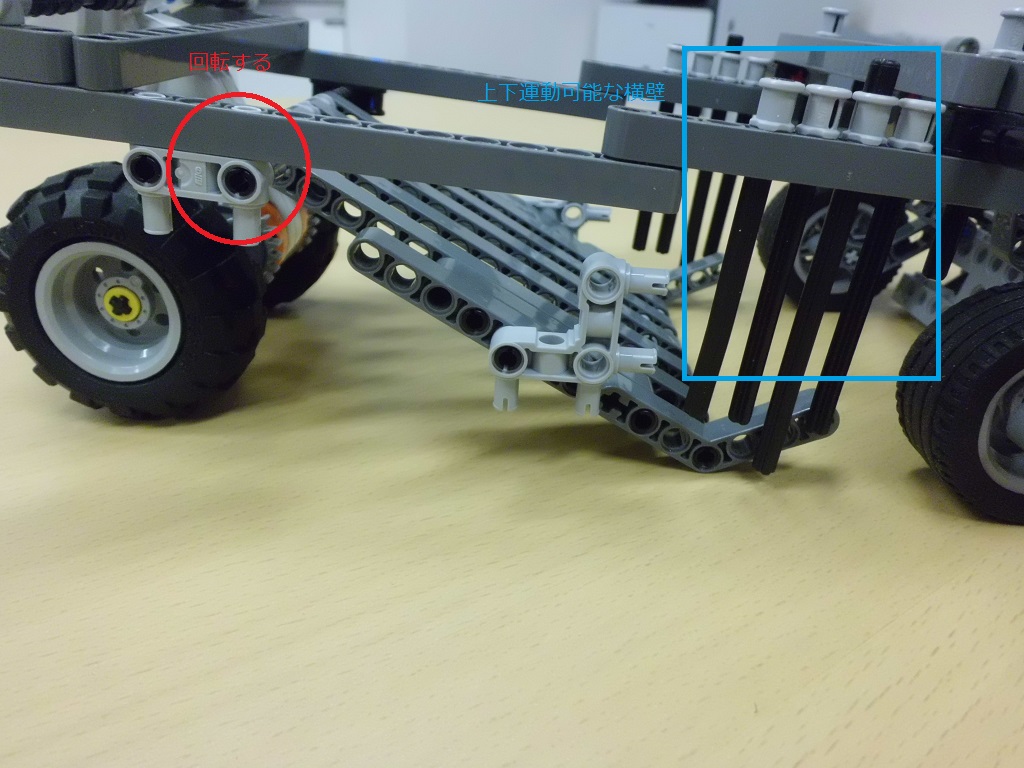
Fig. 3
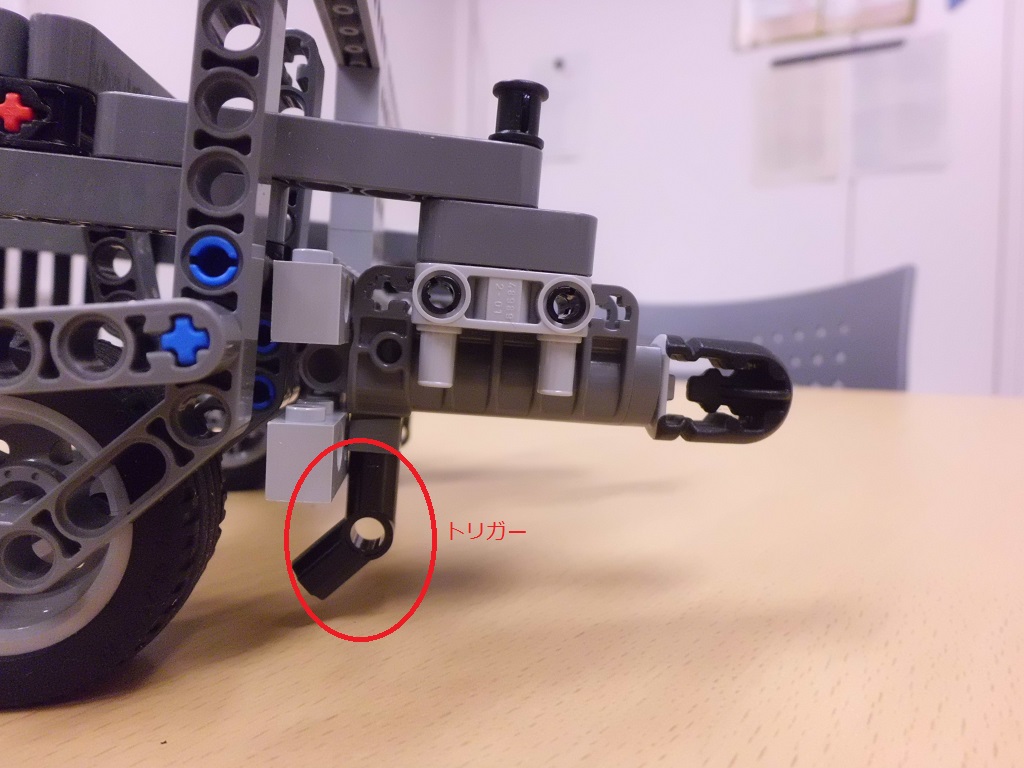
Fig. 4
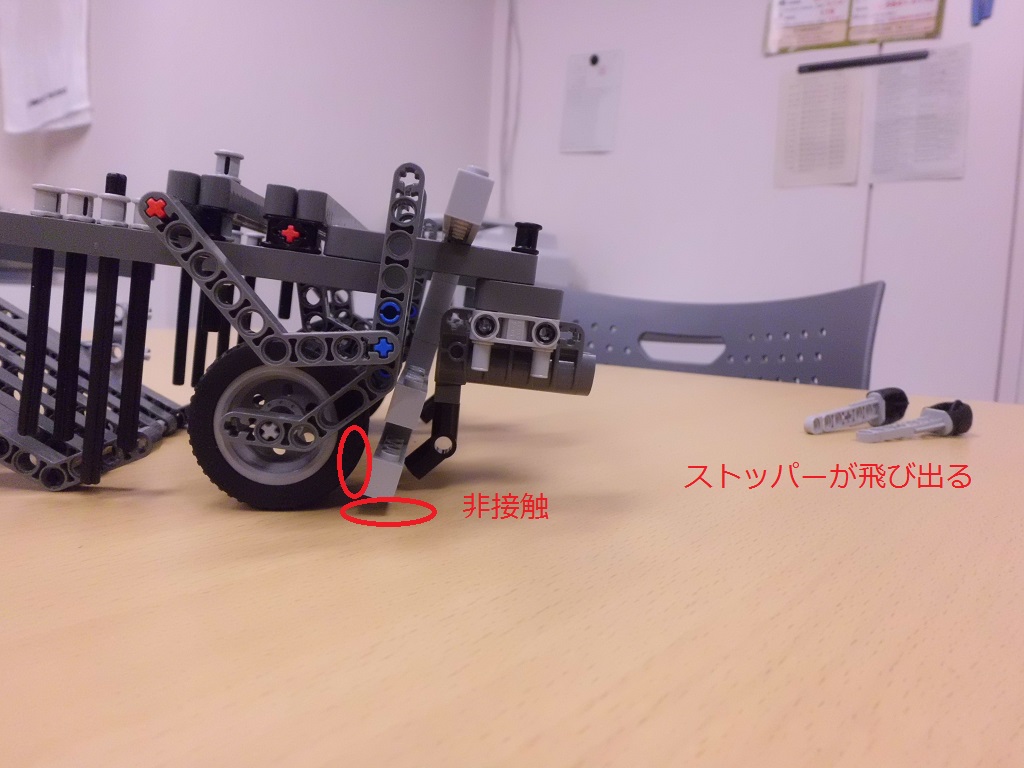
Fig. 5

Fig. 6
製作結果とその分析
瓦礫を寄せてからロボットを1秒静止させた分だけ、瓦礫運搬時間は4~5秒ほどかかり、目標より長くなった。しかし、その分だけ瓦礫の回収率は改善され、9割以上を回収できた。剛性が低い分、障害物の乗り越えるときの衝撃で車体が壊れ、とくにモータのある後輪部と瓦礫を収納している前輪部とに分離してしまうことが多かった(Fig6)。しかし、前輪部は慣性で進み続け、うまくサークル内で停止したため、瓦礫の運搬という目標は達成できた。最大の課題は、3台とマインドストームつなぐコードが邪魔になったことで、コードが絡まってうまくいかないことが度々あった。マインドストームを車体に乗せれば改善される問題だが、そうするとロボットの速度も遅くなるのでこの方法は採用しなかった。このコードに関する問題は、3台を連動して広範囲で動かすという戦略をとった時点で避けられない課題だったように思う。
感想
トライ&エラーを繰り返すなかで自分のアイデアが洗練されていくのがとても楽しかった。特に瓦礫を収納するために障害にぶつかれば壁が落ちてくる機構を思いついたときは心の中で興奮し、実際にうまくいったときはとてもうれしかった。障害物を乗り越えるときにロボットが大きく跳ねるのを改善できないかと悩んだとき、四力学の知識を少し活かせてよかったと思う。思わぬトラブルに悩み、学び、工夫するサイクルの繰り返しで大変だったが、とても楽しく課題に取り組むことができた。