
採用した戦略
今回の課題は、「障害物のある閉塞配管中でデブリを運搬するロボットを製作する」というものであった。
そこで、障害物の両側にロボットを1台ずつ配置して、デブリを受け渡すという戦略を考えた。
レゴマインドストームの仕様上、1台のロボットに使えるモータの数に制限があるため、
アクチュエータを使わずにデブリの受け渡しをする必要があった。
そのためデブリを一度高いところに運び、その位置エネルギーを運動エネルギーに変換して移動させることを考えた。
回収車(荒木)はエレベーターとすべり台を用いた大きいロボットとし、受取車(井端)は車高が低いロボットにしてデブリをキャッチしやすくした。
製作したロボットの概要
- 荒木 (Fig. 1) 前方の4枚のブレード(Fig. 2)を回転することでデブリを掻き込み、昇降台に溜めておく。 その後、配管へ侵入して、タッチセンサ(Fig. 3)が障害物であるつっかえ棒にぶつかるまで移動すると、 デブリの入った昇降台(Fig. 4)をエレベーター式(Fig. 5)に持ち上げ、すべり台(Fig. 6)を用いて、受取車(井端)へデブリを渡す(Fig. 7)。
- 井端 (Fig. 8) デブリを受け取ったことをセンサ(Fig. 9)で確認すると、配管の外までデブリを運搬し、ダンプする(Fig.10: ダンプ前、Fig.11: ダンプ後)。
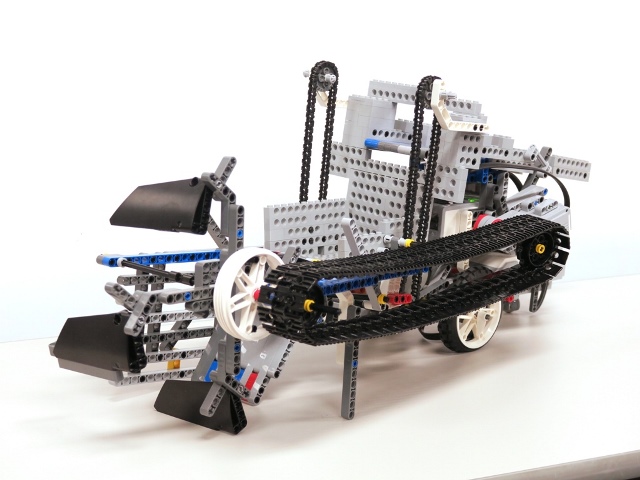
Fig. 1

Fig. 2

Fig. 3
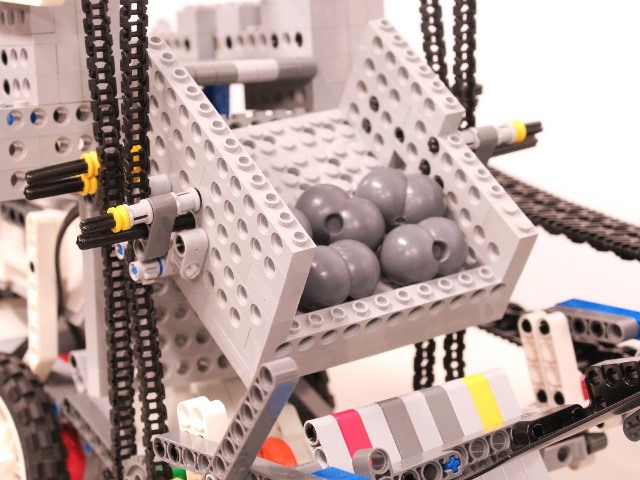
Fig. 4

Fig. 5
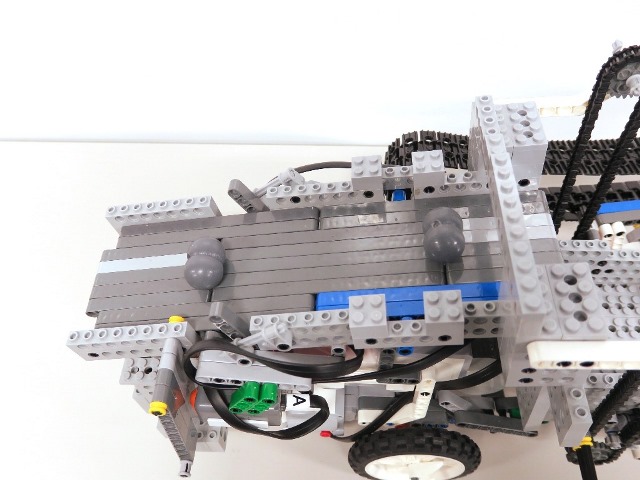
Fig. 6
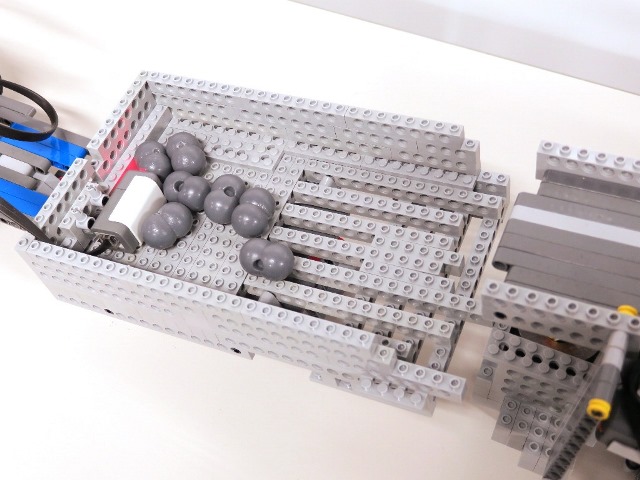
Fig. 7
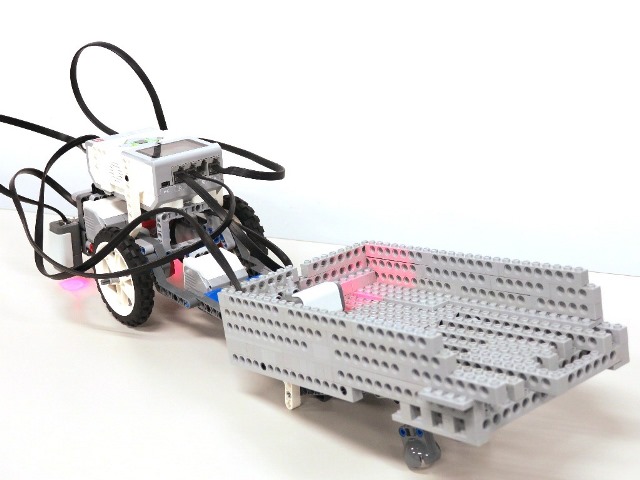
Fig. 8
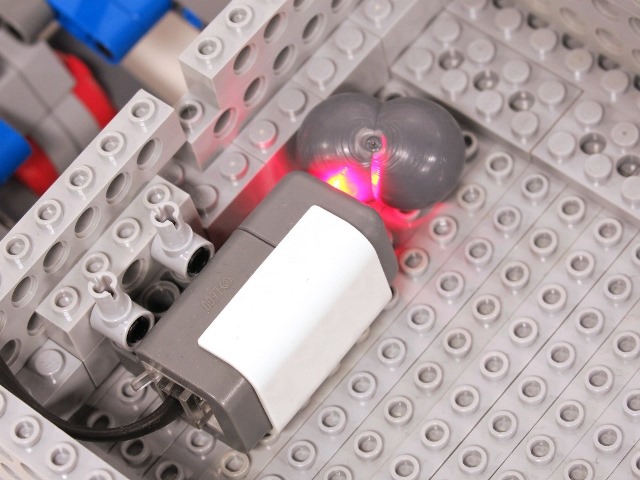
Fig. 9

Fig. 10
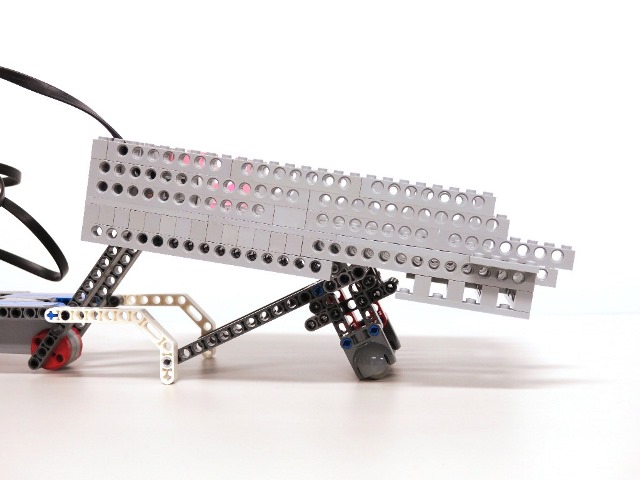
Fig. 11
機構における工夫点
- 掻き込みブレード(Fig. 2):回転半径Rを大きくすることで回収率を上げた。ベルトを用いてモータの動力を伝達した。
- タッチセンサ(Fig. 3):センサの前に上辺を軸に回転できる壁を設置することで、障害物との接触面積を増やし、 確実にセンサが反応するようにした。障害物にぶつかるまでの間も掻き込みを続け、デブリの回収率を上げている。
- エレベーター(Fig. 5):最高点に達したときに昇降台が傾いて、デブリを流し込むような設計にした。チェーンの最適な張り具合を見つけることにも苦労した。
- すべり台(Fig. 6):デブリが引っかかったときのために車体を前後に振動させている。
製作結果とその分析
最終的にデブリを配管の反対側へ運搬するという課題を達成できた。配管内の寸法に収めつつ、機能分散を行い、
高い回収率を実現できたが、改善案も見つかった。
主な問題点としては、回収車が配管に侵入する際に、車体が傾いてしまうということがあった。
レゴゆえの剛性の低さの影響もあると考えられるが、車体の横幅の小型化やタイヤの大型化によって、姿勢を安定させることはできると考えられる。
配管の中心をまっすぐ侵入できるような姿勢制御が可能ならより安定するだろう。
回収率を上げるためには、掻き込み形状や形式の改善、すべり台の摩擦低減を行えば良いと考えられる。
また、今回は時間制限のために断念したが、配管外においてライントレースを用いた制御をできれば尚良かった。
感想
- 川又:制作には時間がかかったが、その分課題を達成できたときの喜びは大きかった。 経験豊富な先生やTAの先輩、他のゼミ生には、自分にはない発想があり、多くを学ぶことができた。 ロボットのネーミングは、中日の伝説の二遊間、荒木選手と井端選手の美しいスイッチトスから発想を得た。
- 綱野:時間が少なかったので細かい仕様を詰めないまま製作に入ってしまった。 そのため重心のバランスが悪い、軸を片持ちせざるを得ないなど不備は多かったが最後まで想定通り動作してくれてとても嬉しかった。 実際にマシンを製作し動かすことで設計上注意するべき点を学ぶことができたと思う。