
採用した戦略
今回我々は、開口部の小さな高放射線環境と想定される空間における常時観測性を実現するロボットとして、図1のようなロボットを以下のようなコンセプトで設計・製作した。
- 高放射線環境においても構成部品が影響を受けないこと
- 障害物の多い高放射線環境でも対象を常時観測できること
- 観測機器が故障した際を想定し、交換が容易であること
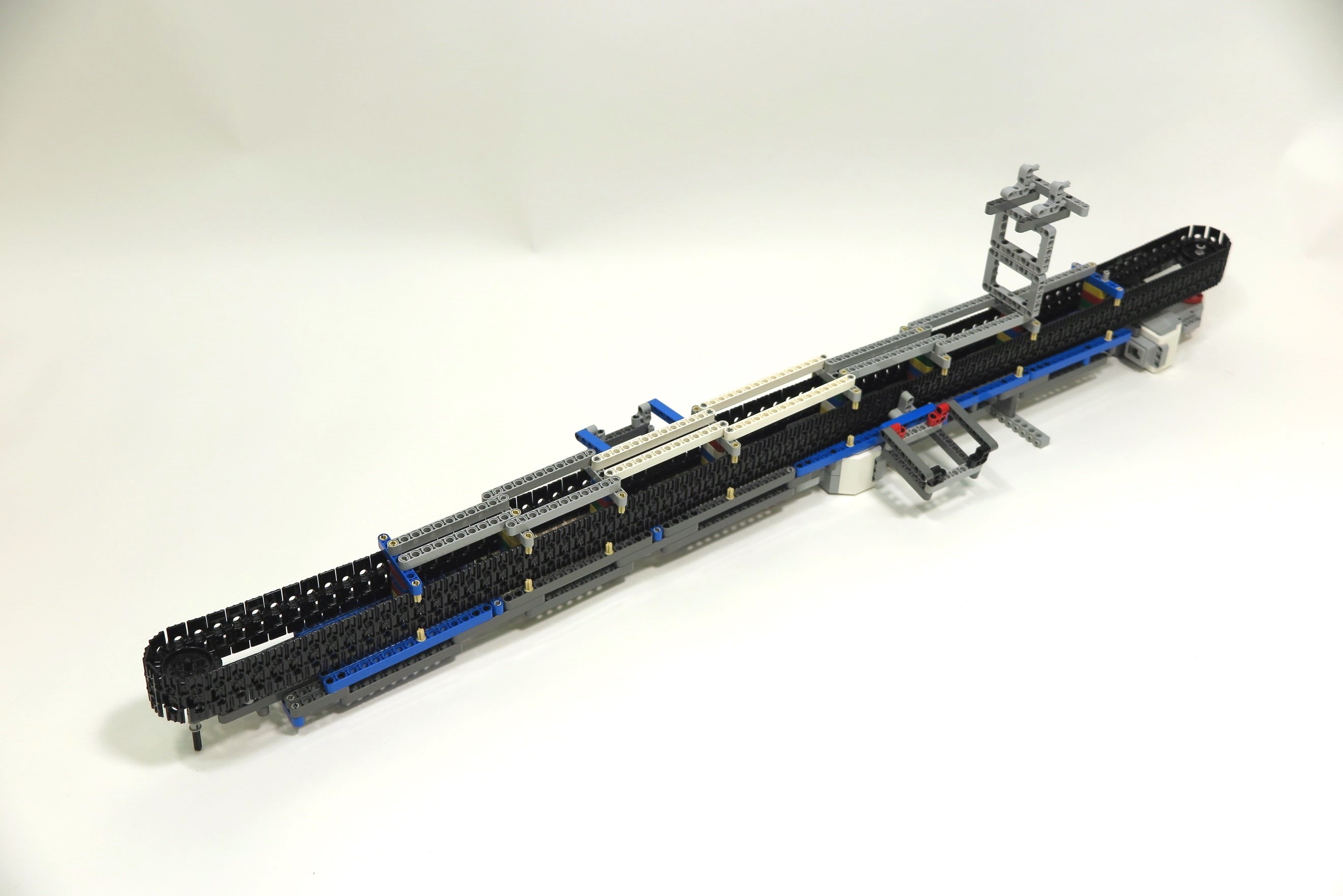
Fig. 1: ロボット全体図
製作したロボットの概要
- 観測対象の存在する空間への進入
このロボットには首振りを行うためのモータがロボットの中央部に一つ設置されており、開口部から進入する際に障害物を避けるように首振りを行うことができるようになっている。(図2) - カメラによる観測
ロボット側面を取り囲むクローラにはカメラを取り付ける籠が設けられている。クローラによるカメラの移動や上で述べた首振りの機能により、図3のように広範囲を観測することが可能となっている。 - カメラの交換
高放射線環境等により観測用のカメラが故障した際には、カメラが取り付けられているクローラを回転させ回収・交換する。この時、クローラに複数台のカメラを取り付けておくことで、回収と同時にカメラを送り込むことができ、要求される機能である常時観測性を実現している。(図4)
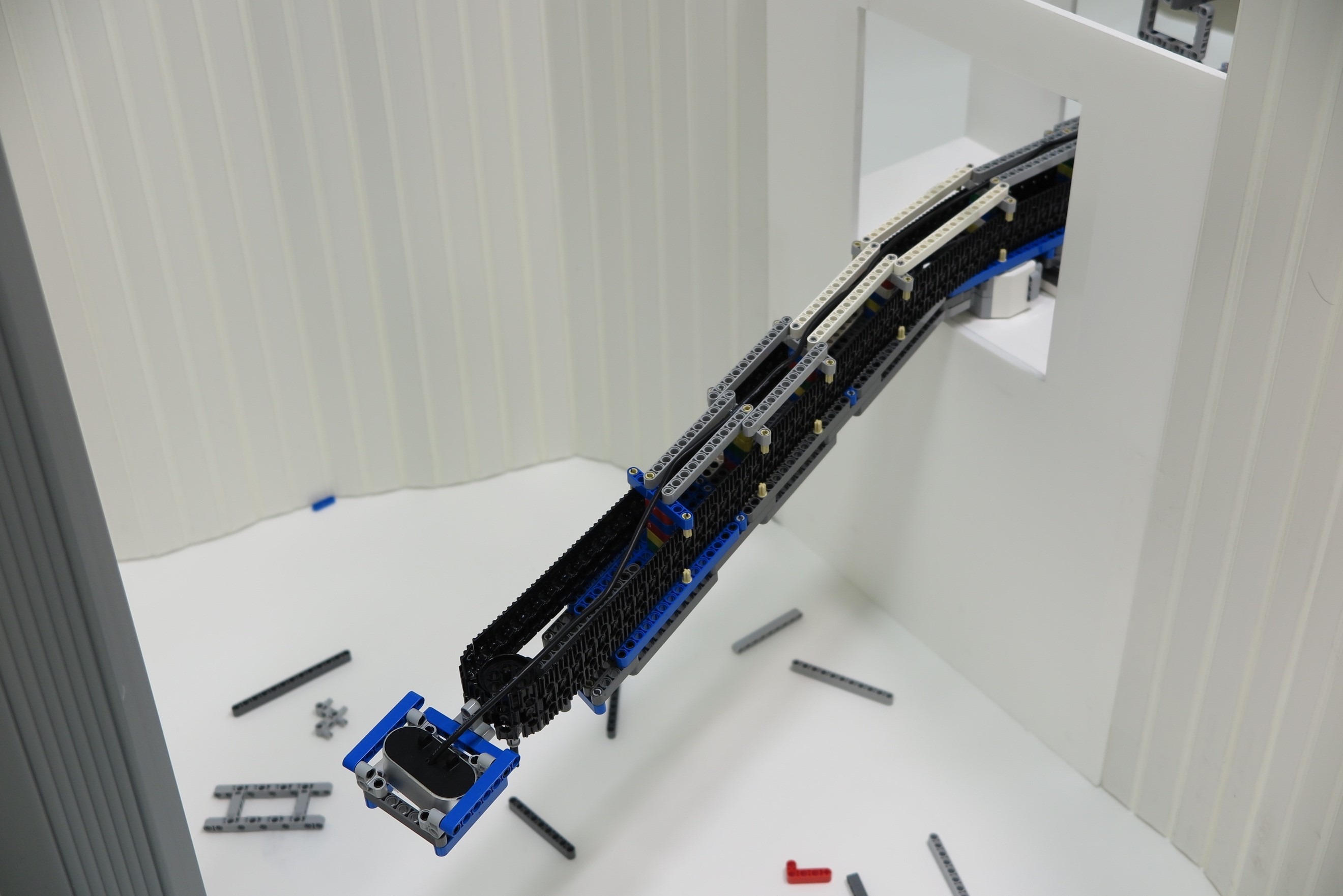
Fig. 2: 首振りを行いながら開口部から進入するロボット

Fig. 3: カメラにより撮影された画像
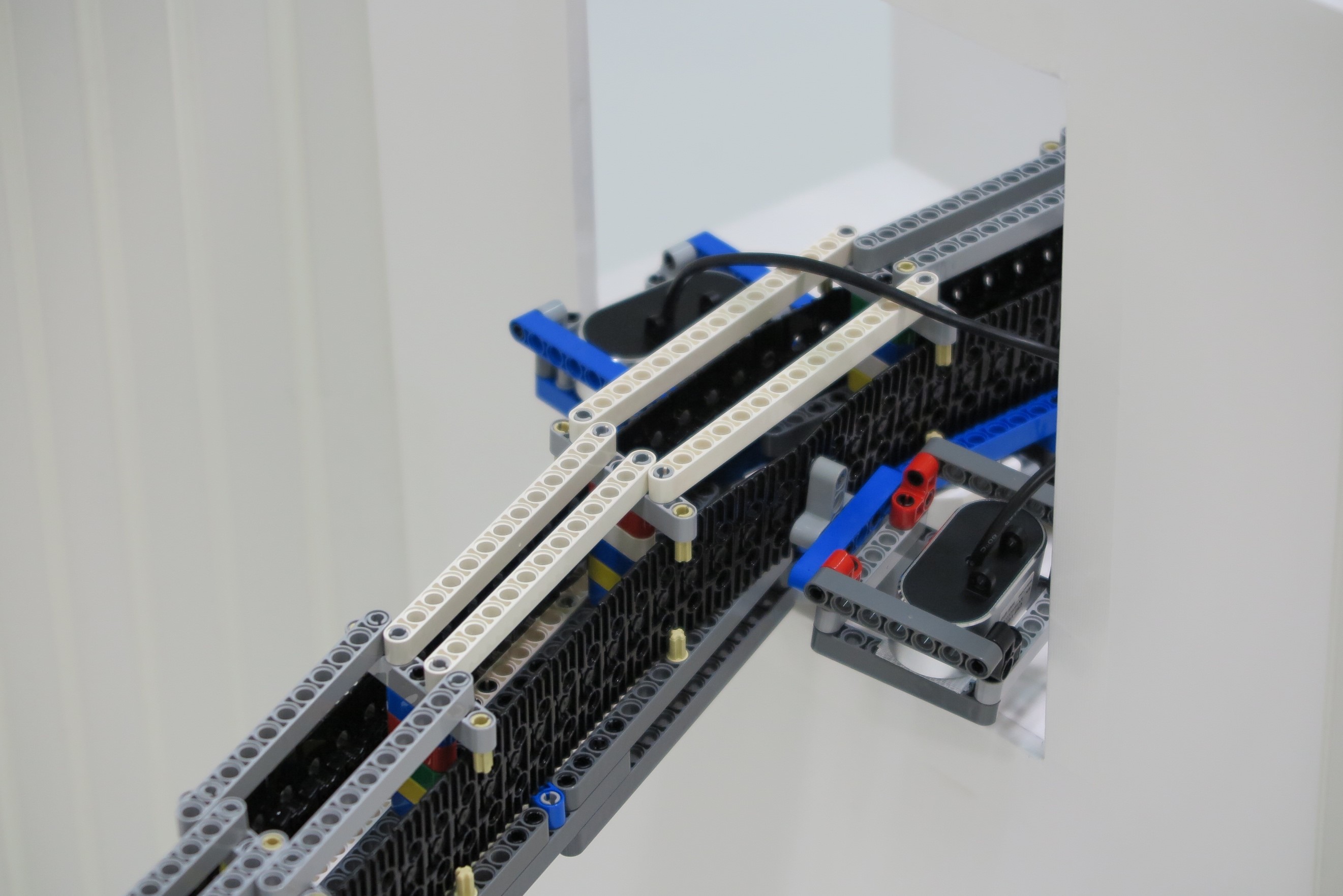
Fig. 4: カメラを運搬する様子
機構における工夫点
- ロボットの首振り機能
ロボットの前半分は平行リンクにより構成されており、これによって首振りを行うことが可能になっている。モータのユニット自体をロボットのフレームに組み込むことで、強度が落ちがちな可動部分の剛性を高めている。 - 横向きに設置されたクローラ
カメラの運搬のため、ロボットの周りを一周するようにクローラが設置されている。首振りを行う際にこのクローラがたるんでしまうことを防止するため、ロボットの先端にあるアイドラプーリにはテンショナが設置されている。(図6,図7)反対側にはスプロケットが設置されている。(図8)このように、ロボットの首振りやクローラの回転に用いるモータをなるべく手前に配置することで、万が一故障した際にも素早い交換作業ができるよう工夫されている。
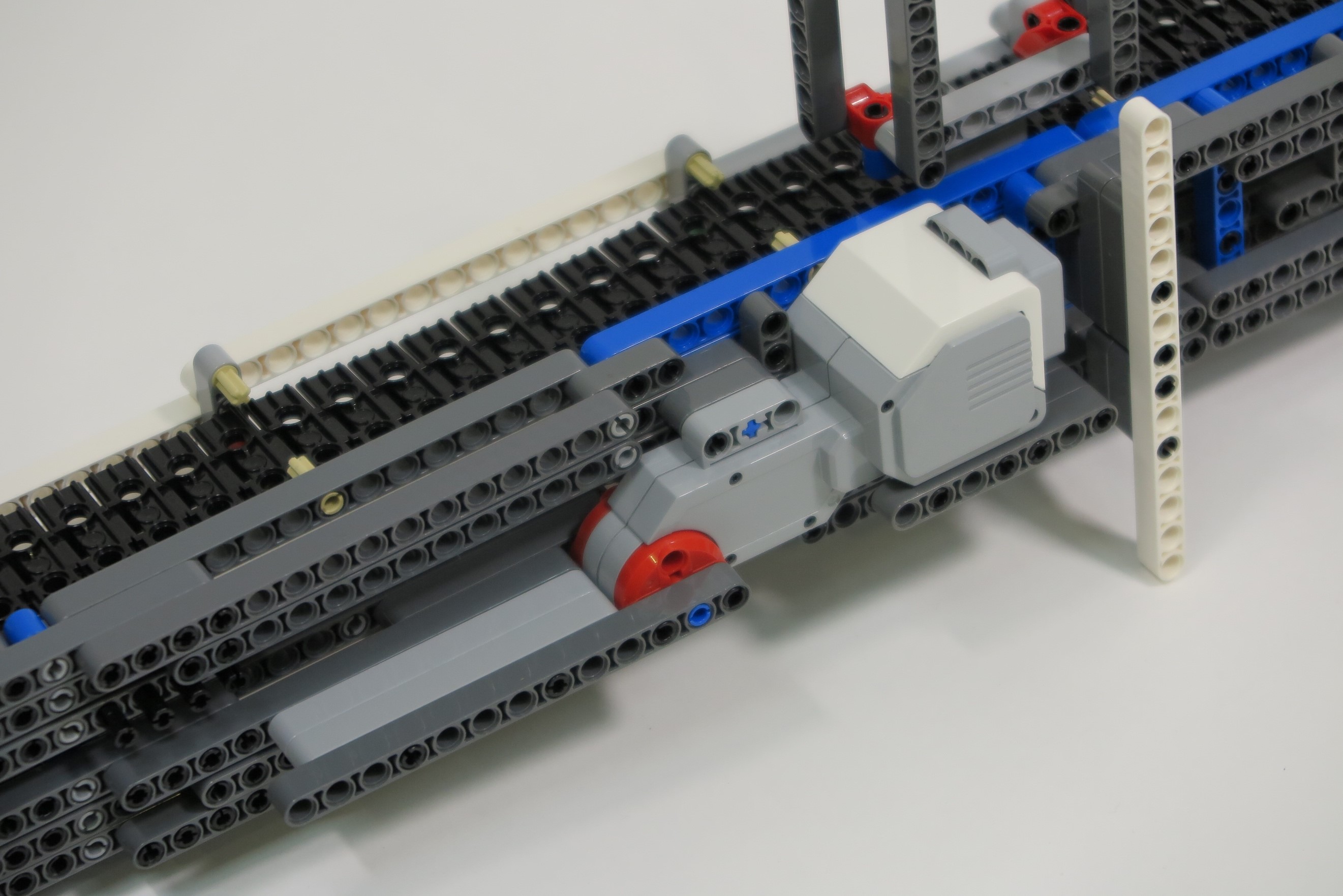
Fig. 5: モータと平行リンク部
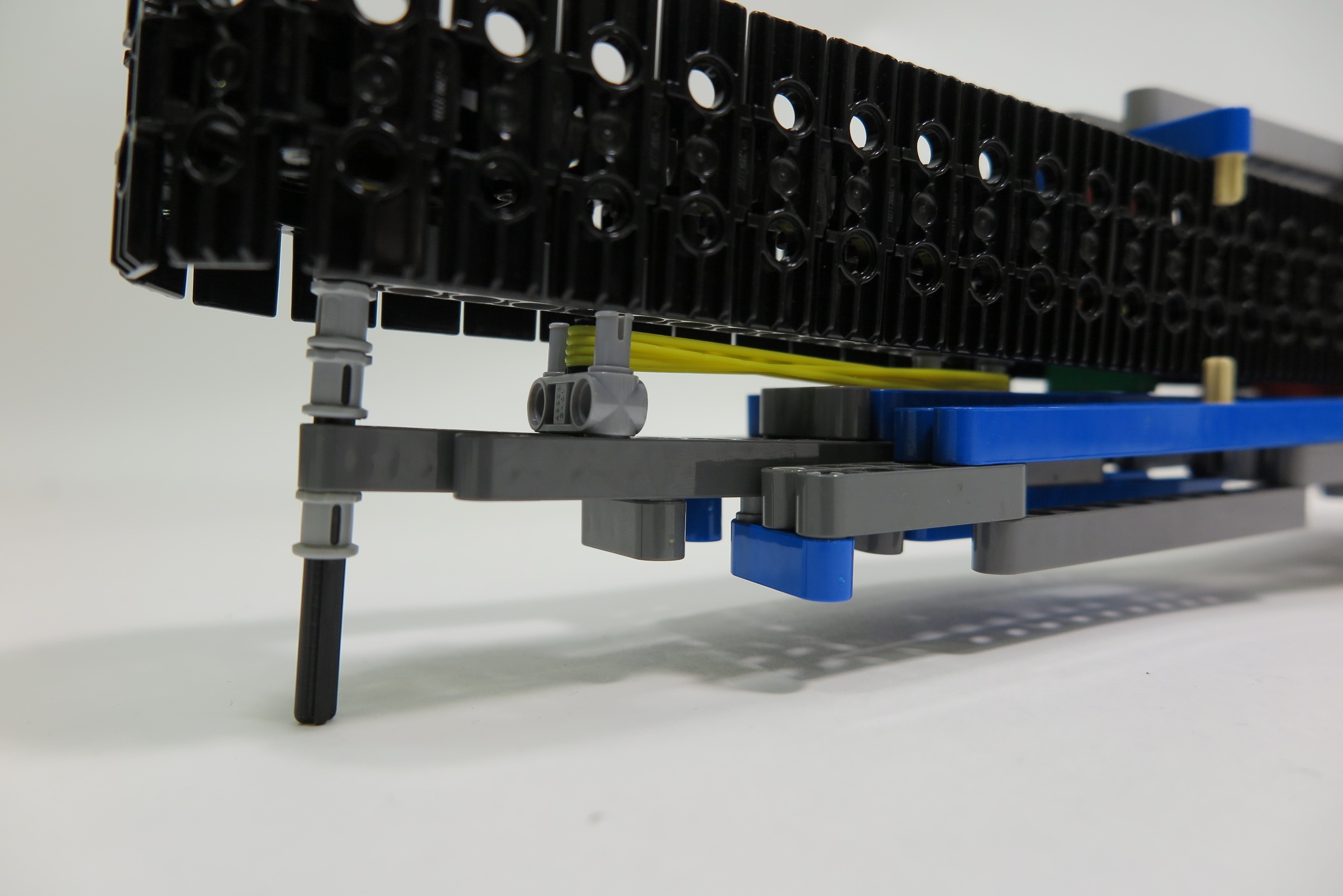
Fig. 6: テンショナ
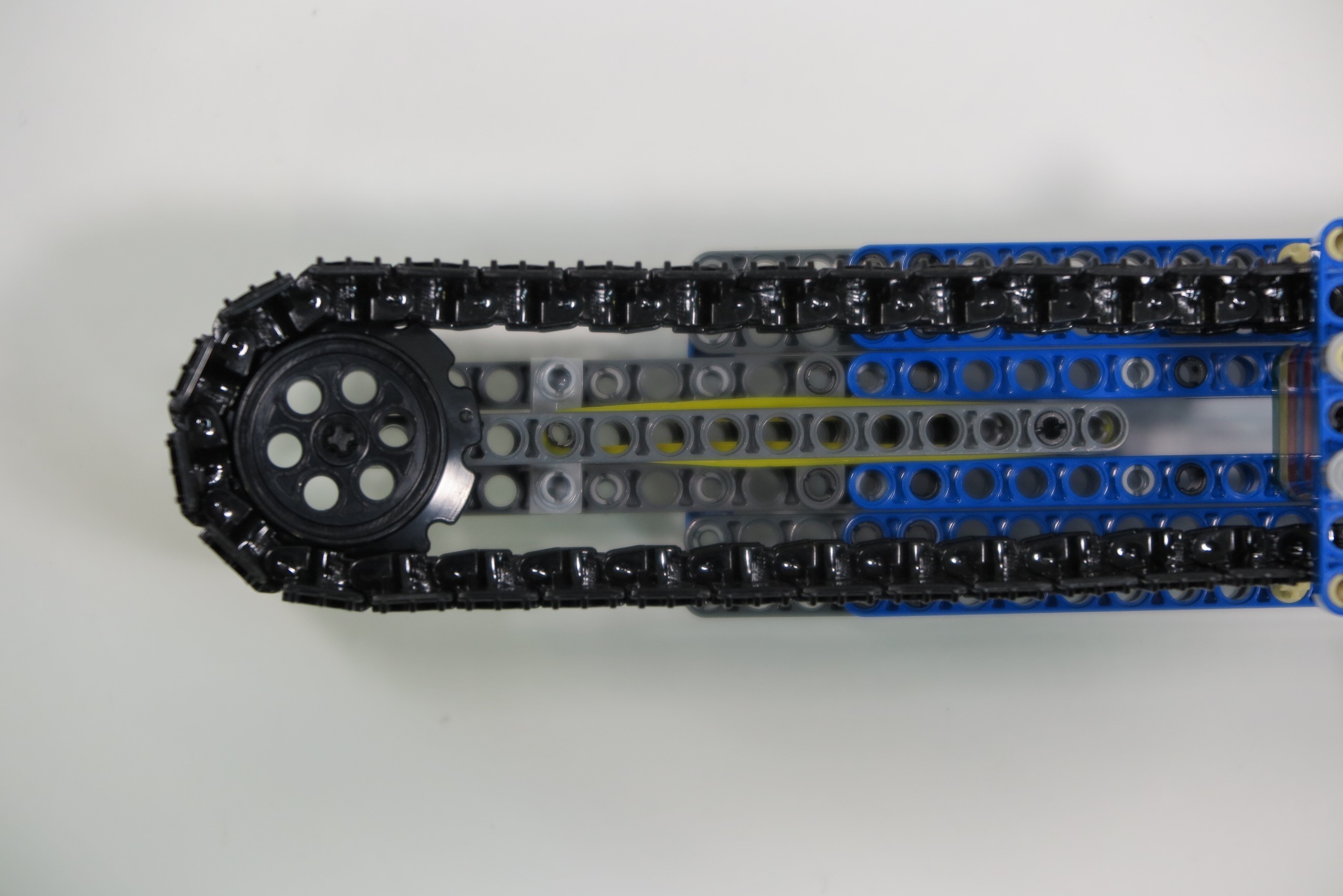
Fig. 7: 上から見たテンショナとアイドラプーリ
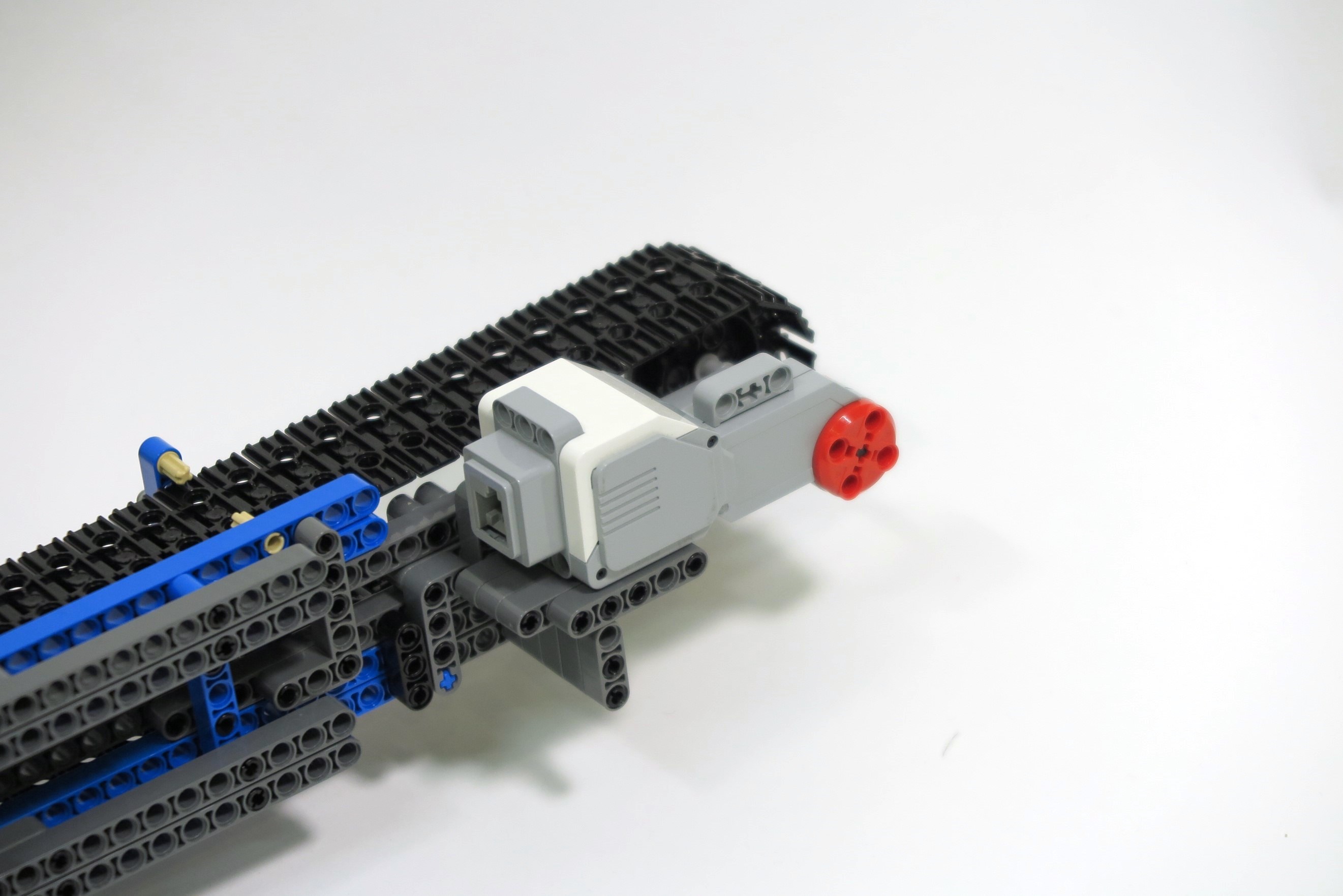
Fig. 8: スプロケット
製作結果とその分析
ロボットを製作し動かしてみた結果、狭い開口部から進入し内部の様子を観測することや、クローラを用いたカメラの交換作業が実際に出来ることが確認された。しかし、横向きに設置されたクローラが動く際に他のLEGOブロックの凹凸と干渉し動きが鈍くなるという問題が明らかになった。また、LEGOブロック同士の接続にプラスチック製のピンを使用していたが、このピンでは回転部分の強固な接続が難しく、ロボット全体に大きなたわみも発生してしまっていた。こうした問題はもう少し工夫すべきであったと考えられる。
感想
今回はLEGOのMindstormsで原子力発電所のPCV内部を観測するロボットのデザインを行った。課題解決のためには、戦略を練る段階から機能を分散し効率化・最適化を考えていく必要があるのだと気付かされた。今回の経験を今後のものづくりに活かしていきたいと思う。