
採用した戦略
こんにゃくを前後左右の壁で囲って固定し、爪楊枝を直動機構で後方よりこんにゃくに刺しこみ、一定距離刺しこむ。その後串が刺さったこんにゃくを直動機構で前後方向に圧縮し、一定以上圧縮したら前方の扉を開き、こんにゃくの弾性を利用して射出する。(Fig. 1)
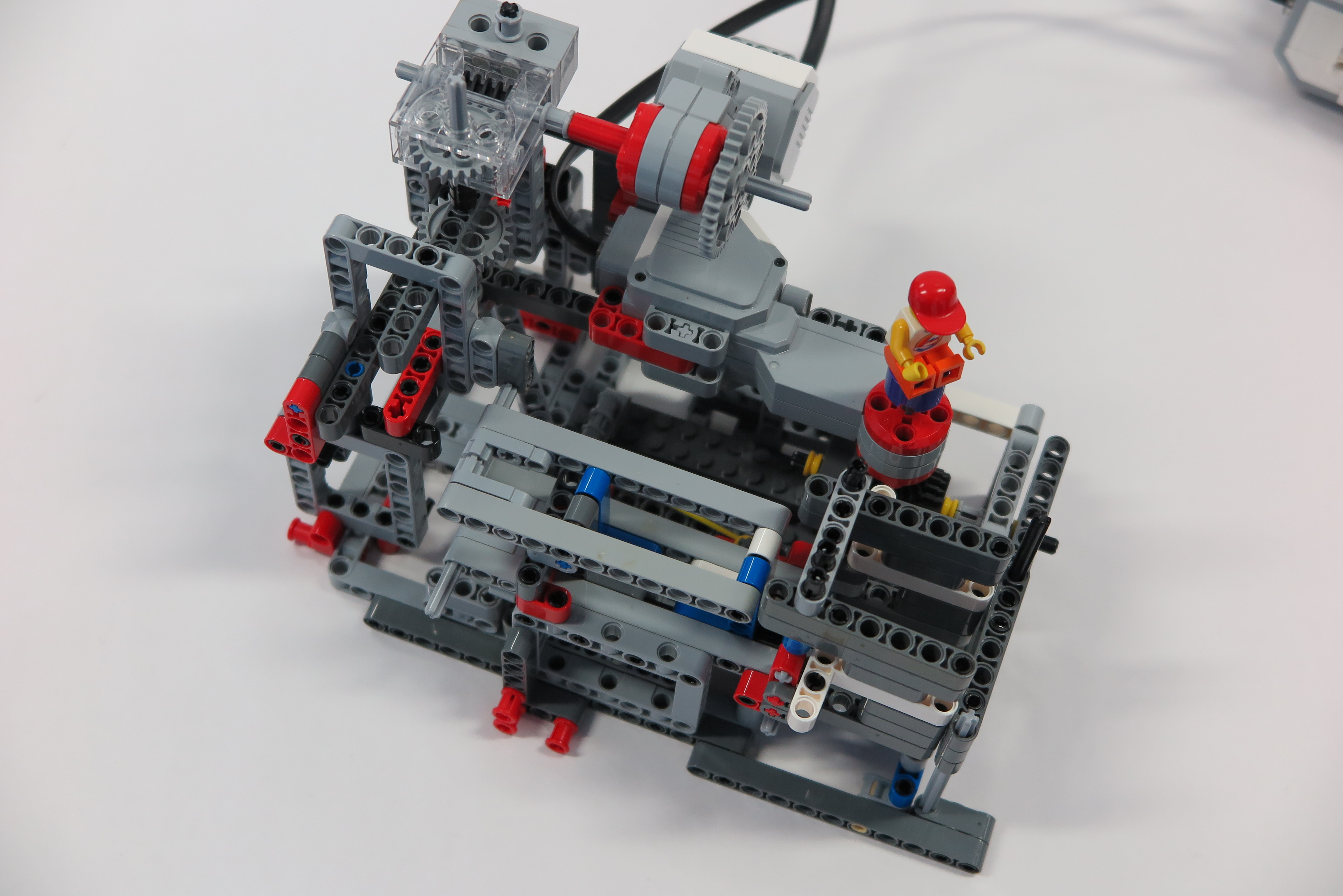
Fig. 1
製作したロボットの概要
【こんにゃくのケージング部分】
細長いレゴパーツを重ねて壁を作り、3面は固定して1面を上下に開閉する扉にした。ケージング部分のサイズは、こんにゃくの短辺を半分に切った時の大きさに合わせ、レゴブロック3マス×5マス分の大きさになっている。(Fig.2)
【爪楊枝のストック部分】
L字型のレゴパーツを用いて左右から挟み込む形で作成し、前後方向はストッパーを置くことで固定している。レゴの最薄パーツ(半ブロック)をスペーサーに用いても、爪楊枝が2本同時に出てきてしまうため、十字の棒パーツと十字の穴を組み合わせて摩擦力で軽く固定し、爪楊枝1本分の薄さを実現した。(Fig. 3)
細長いレゴパーツを重ねて壁を作り、3面は固定して1面を上下に開閉する扉にした。ケージング部分のサイズは、こんにゃくの短辺を半分に切った時の大きさに合わせ、レゴブロック3マス×5マス分の大きさになっている。(Fig.2)
【爪楊枝のストック部分】
L字型のレゴパーツを用いて左右から挟み込む形で作成し、前後方向はストッパーを置くことで固定している。レゴの最薄パーツ(半ブロック)をスペーサーに用いても、爪楊枝が2本同時に出てきてしまうため、十字の棒パーツと十字の穴を組み合わせて摩擦力で軽く固定し、爪楊枝1本分の薄さを実現した。(Fig. 3)
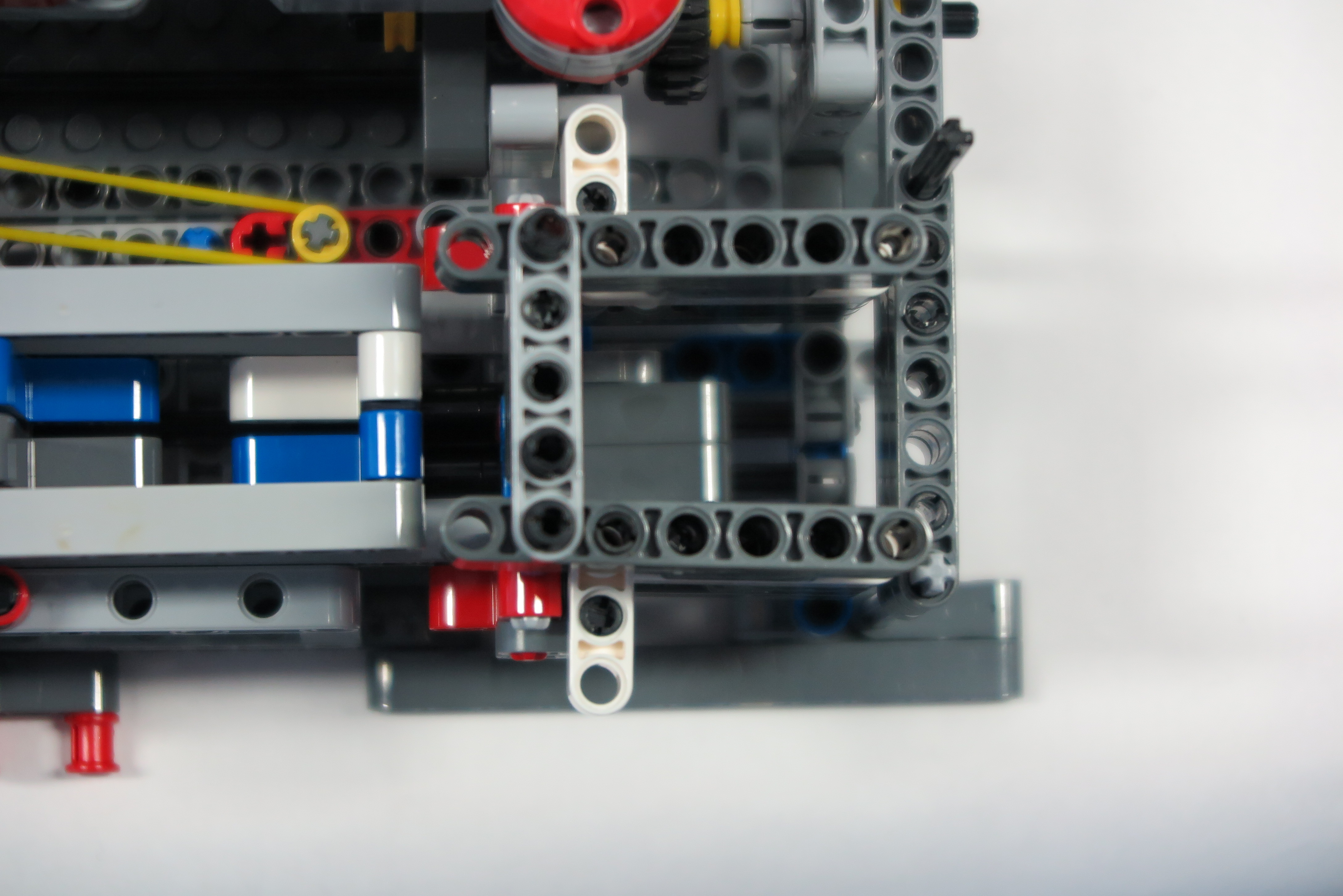
Fig. 2
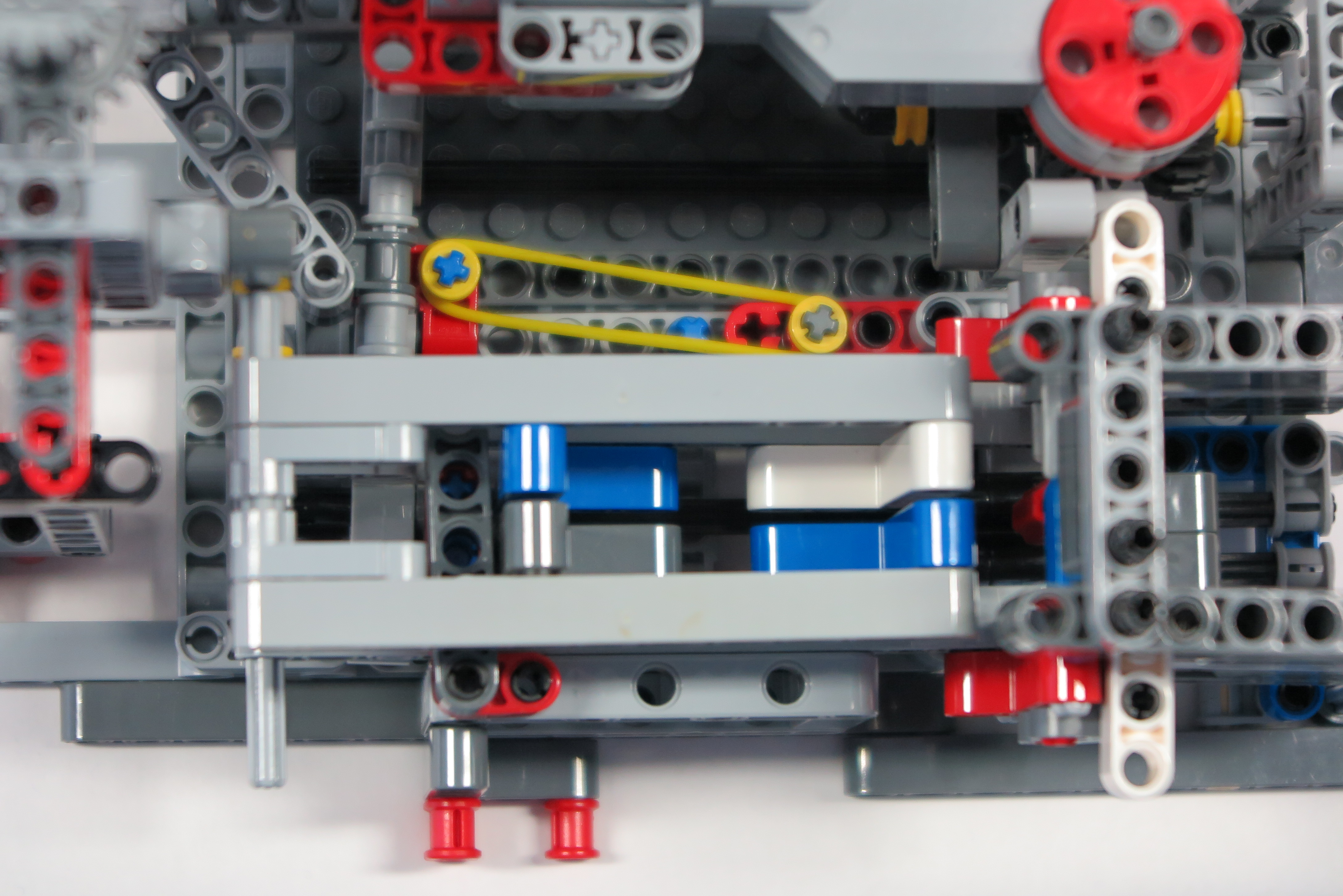
Fig. 3
【直動機構】
爪楊枝を押し出してこんにゃくに刺した後、そのこんにゃくをさらに押して圧縮する機構。2段階に分けて押す機構の詳細は後述する。直動機構としてはピストンクランク機構を採用した。棒パーツをレールとして固定し、レールに沿って動かしている。(Fig. 4, Fig. 5)
【扉の開閉機構】
こんにゃくのケージング部分の1面であり、扉を持ち上げることで圧縮されたこんにゃくを前方に飛び出させる。扉は縦向きに配置された棒パーツに沿って上下している。扉を一瞬だけ開けて閉めるために、扉の持ち上げにはカムを採用した。(Fig. 6)
爪楊枝を押し出してこんにゃくに刺した後、そのこんにゃくをさらに押して圧縮する機構。2段階に分けて押す機構の詳細は後述する。直動機構としてはピストンクランク機構を採用した。棒パーツをレールとして固定し、レールに沿って動かしている。(Fig. 4, Fig. 5)
【扉の開閉機構】
こんにゃくのケージング部分の1面であり、扉を持ち上げることで圧縮されたこんにゃくを前方に飛び出させる。扉は縦向きに配置された棒パーツに沿って上下している。扉を一瞬だけ開けて閉めるために、扉の持ち上げにはカムを採用した。(Fig. 6)
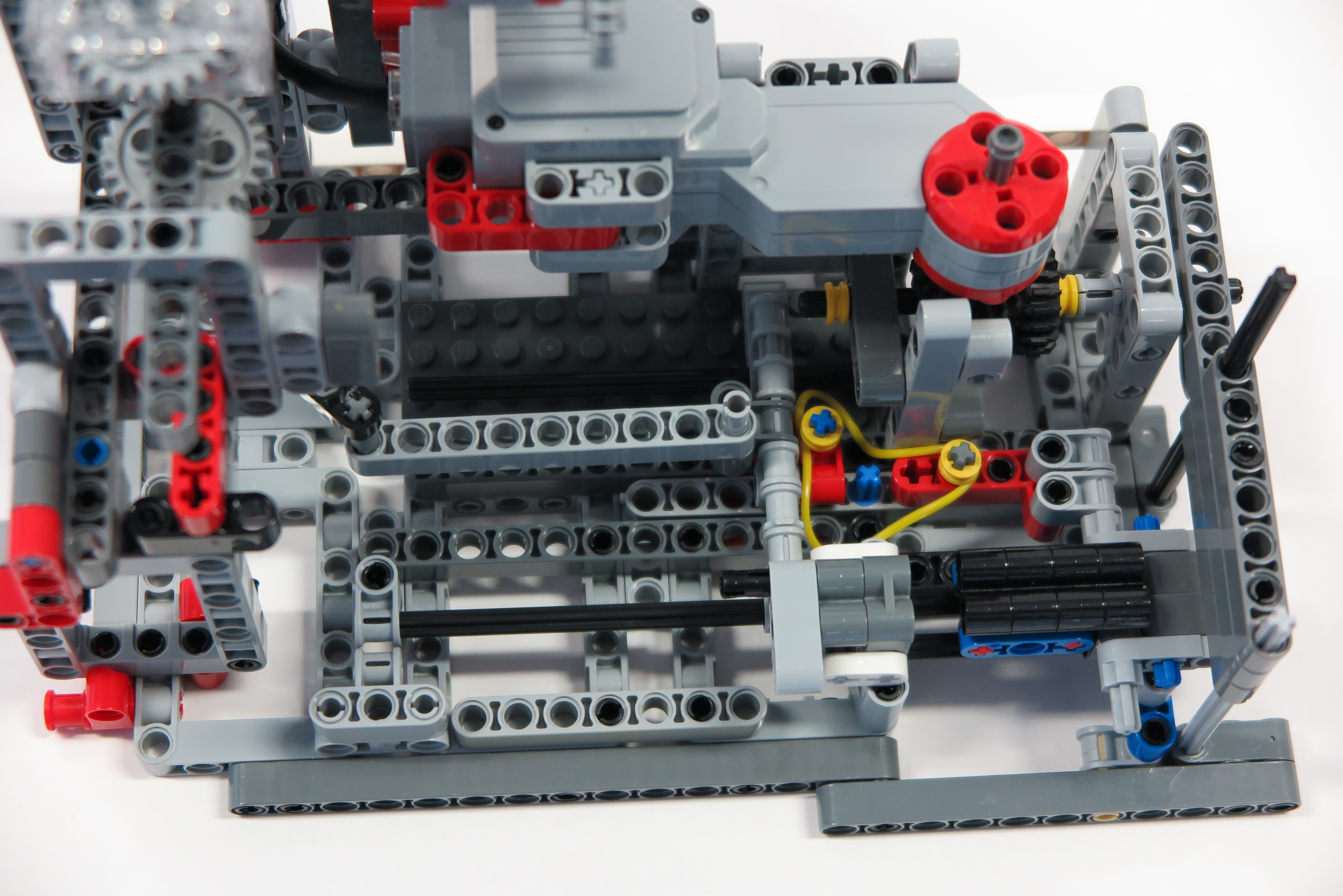
Fig. 4
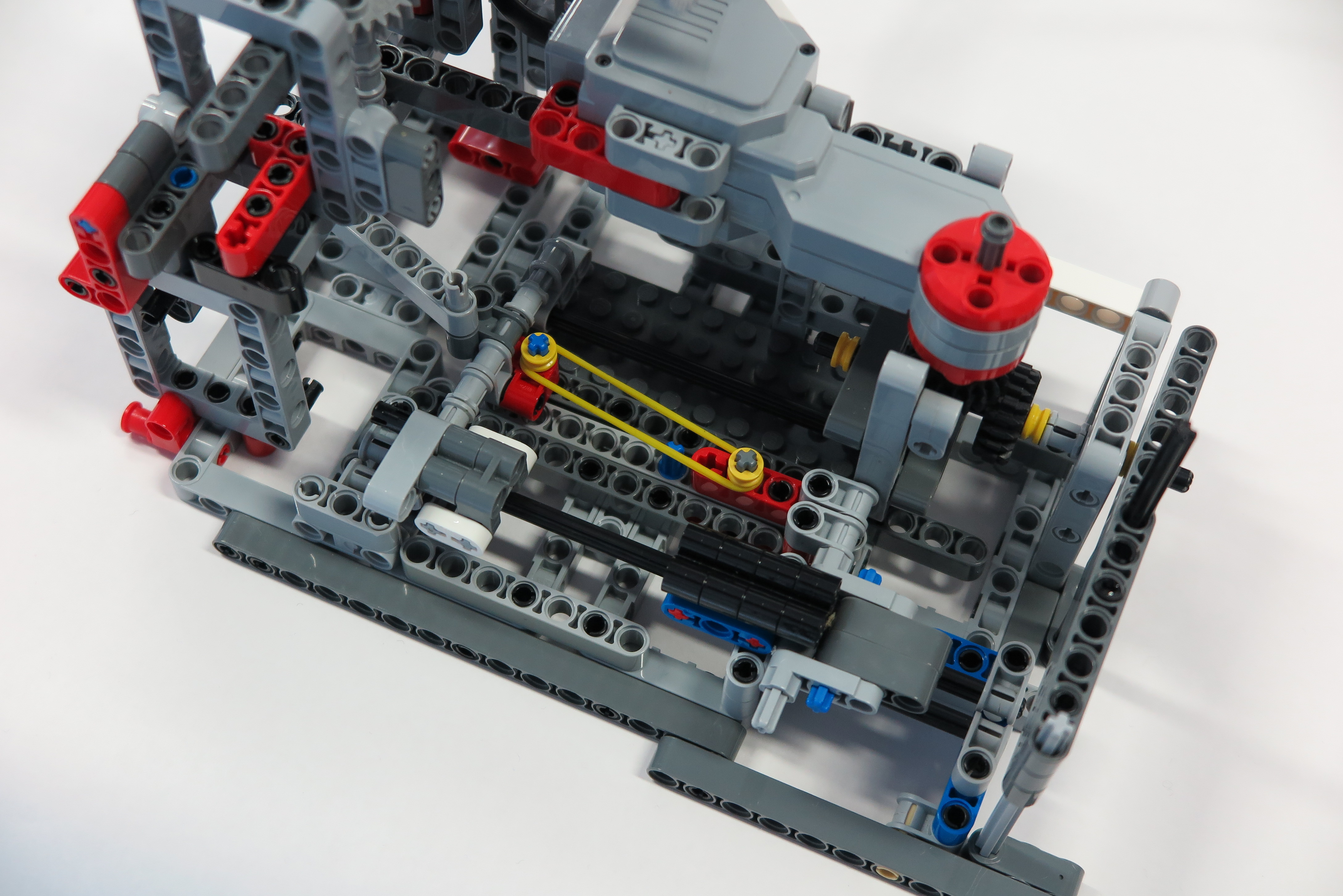
Fig. 5
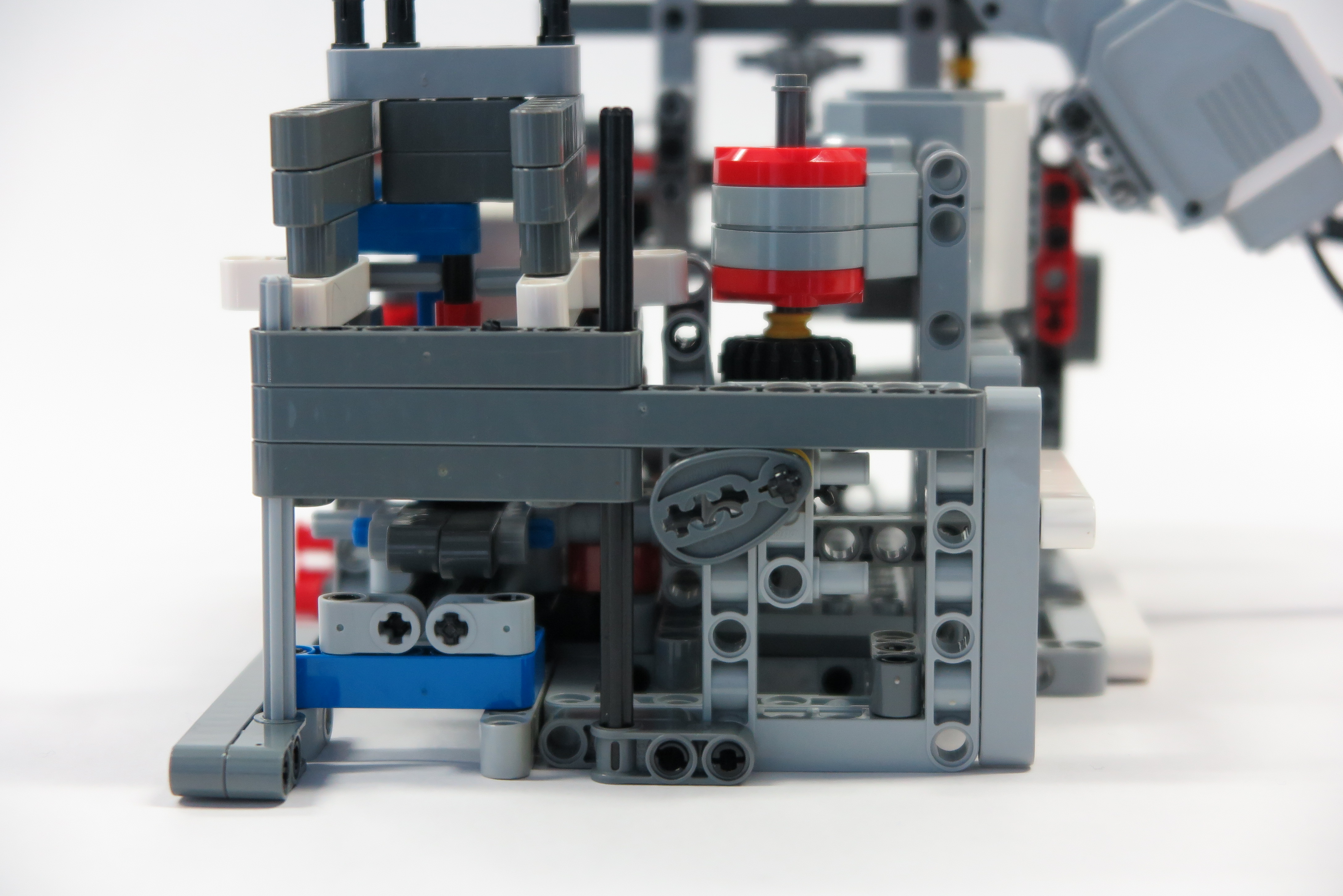
Fig. 6
機構における工夫点
【直動機構】
- 一つの直動機構でこんにゃくに串を刺す動作、串が刺さったこんにゃくを前後方向に圧縮する動作の両方を実現するために2つのスライダーをゴムで連結している。(fig.5)
- クランク機構に直接繋がれた串を直動する機構と串を直動する機構とゴムで繋がれた機構の2つで構成されている最初に串を直動する機構のみが動作し、一定距離進むと串を直動する機構がこんにゃくを押し出す機構に接触し2つのスライダーが同時に押される。(fig.4)
- 扉が開きこんにゃくが射出された後、串を直動する機構は後退する。この際機構間に繋がれたゴムによってこんにゃくを圧縮する機構の後退し、2つの機構は初期位置に戻る。
- また製作最終日に実際にこんにゃくを用いて実験したところ、モーターの出力が想定よりも弱く、こんにゃくの弾力に負けてしまい串が刺さらないというアクシデントが発生した。そのため、ウォームギアを用いて減速して十分なトルクを確保している
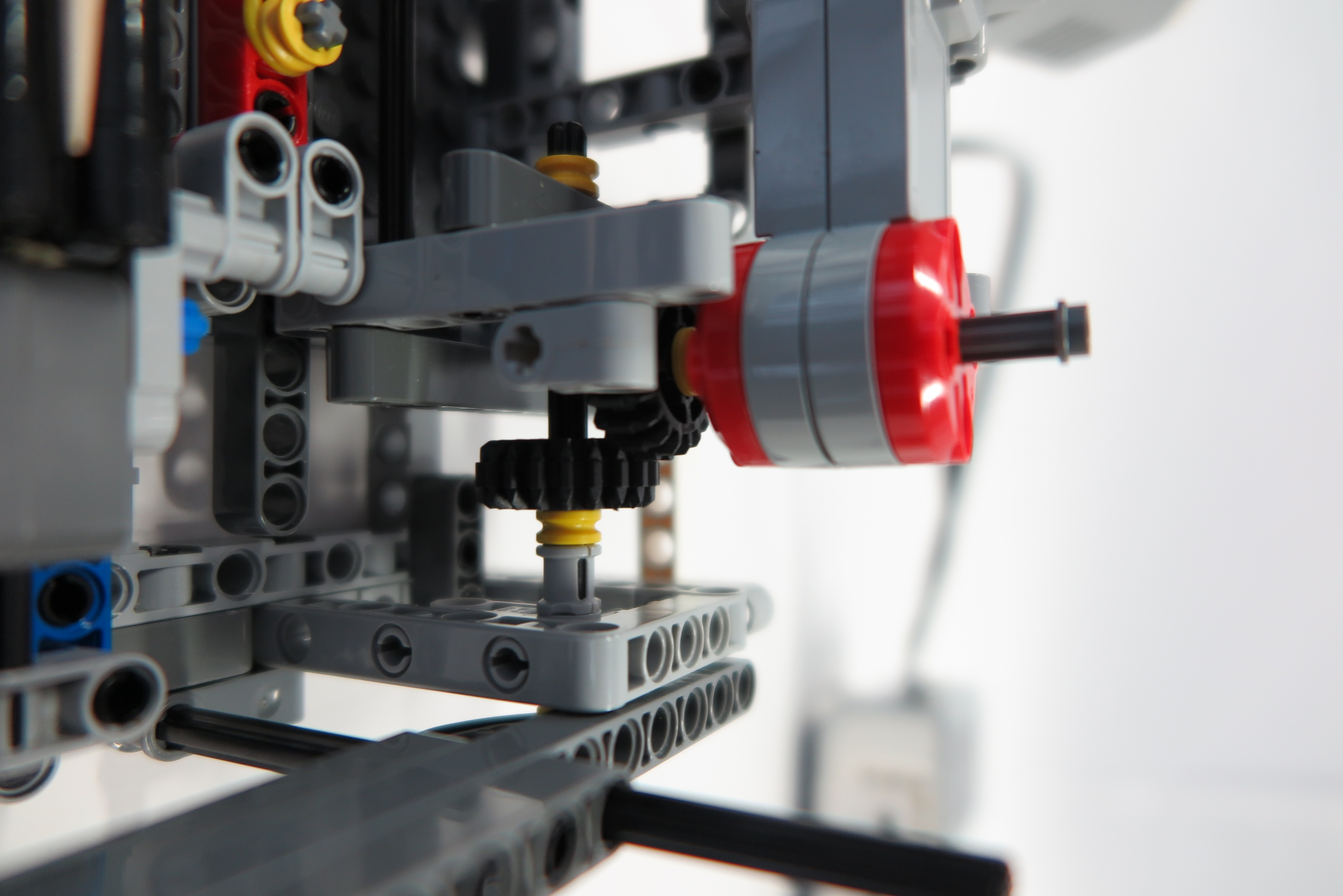
Fig. 7
- なるべく全体を小型化したかったため、モータの配置方向とカムの回転方向が直交してしまった。そのため傘歯車を用いて回転方向を90度変化させている。(fig.7)
- またこんにゃくの飛び出し方は圧縮の度合いによって決まる為、扉を開閉するタイミングが重要となる。
- 人間が手動でタイミングを調整することが困難だったため、直動機構のモータの回転数が一定以上になると自動で開くようになっている。
- さらに扉を開く際は90度回転するようになっているが、射出後に270度回転して初期位置に戻るようにしてテストラン効率を上げている。
製作結果とその分析
こんにゃくと爪楊枝を正しい位置にセットすることで、一つずつではあるが、最終的に高い成功率で爪楊枝を刺し、射出することができた。しかし、発展的な目標の一つであった連続稼働は実現できなかった。その原因としては、ストックしてあるこんにゃく同士や爪楊枝同士の摩擦によって詰まってしまい、うまく押し出せないことが挙げられる。こんにゃく同士の摩擦は、こんにゃくを水で濡らすことによって解消できたが、爪楊枝はセロテープで覆う等の処置をしても詰まりは解消できなかった。今回は時間の都合上試せなかったが、爪楊枝に油を塗ったり、爪楊枝の材質をプラスチックのものに変えたりすることで改善が見込まれる。また、もう一つの発展的目標である、「モーター1つで全ての機構を実現させる」は最終日にモーターのトルク不足が発覚し、新たなモーターとウォームギアを取り付けたため、達成には至らなかった。トルク不足の原因は、最も力が必要な「こんにゃくを圧縮する」部分を、最も力が伝わりづらい、ピストンクランクの下端が担っていたことが挙げられる。ウォームギアをつけることでも解決できたが、直動機構をラックアンドピニオンに変えることでも安定して力を伝えられると思われる。
感想
- 【鳥山】レゴの最小部品よりも小さな径である爪楊枝を直動する機構を実現することに苦労しました。またこんにゃくの弾力にモーターのトルクが負けてしまうといった問題は試作の段階で気づくべきバグだったと反省しています。さらにこんにゃくの湿り度合いによって飛び出し具合が大きく変化するといったオブジェクトに起因するバグも多々発生し、オブジェクトの状態のチェックの重要さを学びました。
- 【広沢】剛性の低いレゴでガタつかないように機構を作っていくのが難しかったです。また、細い爪楊枝を扱うのが今回のロボットの最難関でした。もう少し太い串を使えばよかったと思っています。初めてのレゴでのロボット製作で、手探りで進めていきましたが、後々、「ここの機構変えたいけど上の機構が邪魔で手が付けられない…」というのが多発し、実製作前の計画や段取りの大切さを痛感しました。