
2020年度

2020年度の機械工学ゼミナールでは,次のようなミッションを学生に与えました.
「本ゼミナールでは,通常のロボットでは操ることが難しい”柔らかいモノ”を操るロボットについて,ロボットを試作しながら勉強します。人間でも扱うのが難しい柔らかいものを,ロボットが扱うためには,ロボットという機械ならでは方法・戦略が有効になると想定されます。このゼミを通して,難しいタスクをこなすロボットにおいて,どんな考え方,戦略が必要かを一緒に探求しましょう。」
新型コロナウィルス感染症(COVID-19)の影響で,講義・演習のオンライン化が求められる中,必要最小限の回数のみ対面での製作を行うこととし,それ以外はオンラインでの講義・議論を行いました。オンラインという制約によりゼミ生の創造性が削がれないようにするために,前年まで長らく続いていた福島第一原子力発電所の廃炉を意識したテーマではなく,より広く検討が可能なテーマを設定しました。ゼミ生自らマニピュレーション対象である”柔らかいモノ”を選んで難易度を調整可能とした点がポイントです。結果として過去の成果よりもユーモアのある成果が生まれたと思います。
それでは2020年度のゼミ生の成果をご覧下さい。
2019年度
2019年度の機械工学ゼミナールでは,次のようなミッションを学生に与えました.
「本ゼミナールでは,福島第一原子力発電所等の人が立ち入ることが出来ない極限環境で動作するロボットについて,実際にロボットを試作しながら勉強します。課題は事故炉の格納容器内部の様子を常時観察可能なロボットをデザインすることです。人が立ち入ることが出来ない環境において,ロボットが活躍するには,どんな考え方,戦略が必要かを一緒に探求しましょう。
2011, 2013, 2014, 2015,2016,2017年度に引き続き,東京電力福島第一原子力発電所の事故に対応するロボットに求められる機能の実現に取り組んでもらうために上記のような課題設定にしました.2019年度は過去のゼミとは実現する機能の方向性を変更して,デブリ取り出しフェーズを意識し,PCV内部を常時観察することを想定した課題に設定しました.
それでは2019年度のゼミ生の成果をご覧下さい.
2017年度

2017年度の機械工学ゼミナールでは,次のようなミッションを学生に与えました.
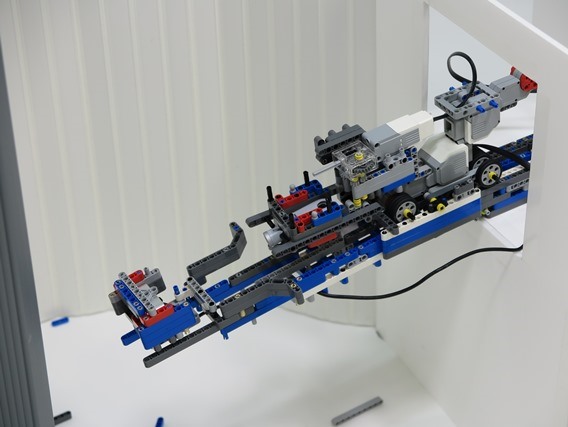
「本ゼミナールでは,ロボットによる物体のマニピュレーションについて,実際にロボットを開発しながら考えます。課題は幅の狭い直線通路の上で瓦礫を効率良く運搬するロボットをデザインすること。発電所等の災害現場で活動するロボットのプロトタイプ開発に取り組んでもらいます。足場が不安定な狭隘(きょうあい)環境において,早く・確実に瓦礫の運搬を実現するにはどんな戦略が適切かを一緒に探求しましょう。」
2011, 2013, 2014, 2015,2016年度に引き続き,東京電力福島第一原子力発電所の事故に対応するロボットに求められる機能の実現に取り組んでもらうために上記のような課題設定にしました.2017年度は過去のゼミから更に難易度を上げ,PCV底部に体積しているデブリを如何に効率的に,PCV外部に取り出すかということを想定した課題に設定しました.
それでは2017年度のゼミ生の成果をご覧下さい.
2016年度

2016年度の機械工学ゼミナールでは,次のようなミッションを学生に与えました.
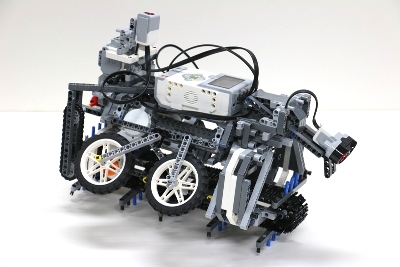
「本ゼミナールでは,ロボットによる物体のマニピュレーションについて,実際にロボットを開発しながら考えます。課題は閉塞した配管中で瓦礫(がれき)を効率良く収拾するロボットをデザインすること.発電所等の災害現場で活動するロボットのプロトタイプ開発に取り組んでもらいます.障害物がある狭隘空間の中で,早く・確実に瓦礫運搬を実現するにはどんな戦略が適切かを一緒に探求しましょう.」
2011, 2013, 2014, 2015年度に引き続き,東京電力福島第一原子力発電所の事故に対応するロボットに求められる機能の実現に取り組んでもらうために上記のような課題設定にしました。2014年度の水平に置かれたパイプの中で動作するロボットの開発という課題から一段難易度を上げ,2016年度は閉塞状態(障害物がある)パイプの中で動作するロボットの開発に取り組んでもらいました。瓦礫を運搬するという機能に加えて,障害物を避けるという機能を加えたことにより,2014年度とは異なる,新しい戦略が生み出されました。
それでは2016年度のゼミ生の成果をご覧下さい.
2015年度

2015年度の機械工学ゼミナールでは,次のようなミッションを学生に与えました.
「本ゼミナールでは,ロボットによる物体のマニピュレーションについて,実際にロボットを開発しながら考えます。課題は円筒容器の中から瓦礫(がれき)を効率良く収拾するロボットをデザインすること.発電所等の災害現場で活動するロボットのプロトタイプ開発に取り組んでもらいます.限られた空間の中で,早く・確実に瓦礫収拾動作を実現するにはどんな戦略が適切かを一緒に探求しましょう.」
2011, 2013, 2014年度に引き続き,東京電力福島第一原子力発電所の事故に対応するロボットに求められる機能の実現に取り組んでもらうために上記のような課題設定にしました。2014年度は水平に置かれたパイプの中で動作するロボットでしたが,2015年度は垂直に置かれたパイプの中で動作するロボットの開発に取り組んでもらいました。重力に逆らった動作が求められると格段に機構設計の難易度は上がりますが,その分,これまでにない新しい形態のロボットを創造してもらうことができました。
それでは2015年度のゼミ生の成果をご覧下さい.
2014年度
2014年度の機械工学ゼミナールでは,次のようなミッションを学生に与えました.
「本ゼミナールでは,ロボットによる物体のマニピュレーションについて,実際にロボットを開発しながら考えます。課題は細い配管中で瓦礫(がれき)を効率良く運搬するロボットをデザインすること.発電所や化学プラントでの災害で活動するロボットのプロトタイプ開発に取り組んでもらいます。限られた空間の中で,早く・確実に瓦礫運搬動作を実現するにはどんな戦略が適切かを一緒に探求しましょう。」
2011,2013年度に引き続き,東京電力福島第一原子力発電所の事故に対応するロボットに求められる機能の実現に取り組んでもらうために上記のような課題設定にしました。2011,2013年度は概ね平坦な地形で動作するロボットの製作でしたが,2014年度はパイプの中で動作することを特徴とするロボットの開発に取り組んでもらいました。パイプの中を動くという細かなレギュレーションの違いが,ロボットの基本構造に大きな変化をもたらすことが分かりました
それでは2014年度のゼミ生の成果をご覧下さい.
2013年度

2013年度の機械工学ゼミナール(以下ゼミ)では,次のようなミッションを学生に与えました.
「本ゼミナールでは,ロボットによる物体のマニピュレーションについて,実際にロボットを開発しながら考えます。課題は瓦礫(がれき)を効率良く運搬するロボットをデザインすること.自然・人為的災害が発生した際に瓦礫を運搬するロボットのプロトタイプ開発に取り組んでもらいます。早く・確実に瓦礫運搬動作を実現する戦略に必要なことが何かを一緒に探求しましょう。」
2011年度に引き続き,大規模災害(特に東京電力福島第一原子力発電所の事故)に対応するロボットに求められる機能の実現に取り組んでもらうために上記のような課題設定にしました。基本的なルールは2010年度のドミノ運搬ロボットのそれを踏襲しつつ,搬送対象の物体を瓦礫を模したブロックに変更しました。対象の物体のわずかな変化が,学生にもたらす戦略の変化につながることを期待しましたが,製作物を観察すると,概ね採用された戦略はこれまで同様のものであったように見受けられます。
それでは2013年度のゼミ生の成果をご覧下さい.
2011年度
2011年度の機械工学ゼミナール(以下ゼミ)では,新規に課題を設定し,次のようなミッションを学生に与えました.
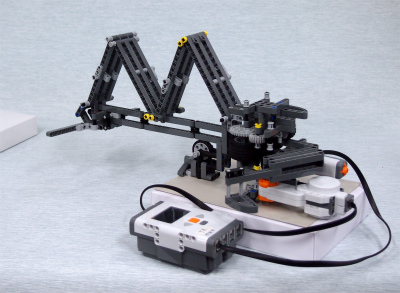
「本ゼミナールでは,ロボットによる物体のマニピュレーションについて,実際にロボットを開発しながら考えます.課題は架橋ロボットをデザインすること.災害時に河川などに橋を渡すロボットのプロトタイプ開発に取り組んでもらいます.早く・確実に架橋動作を実現する戦略に必要なことが何かを一緒に探求しましょう.」
2009年度・2010年度と物体を操作する(マニピュレーション)することにおける『戦略』の重要性を議論してきましたが,2011年3月の東日本大震災での大きな被害を目の当たりにし,教育のためだけの課題設定ではなく,その先にある人に役に立つ機械(ロボット)のデザインを目指すための課題設定をしました.もちろん,実際に被災地を訪問して具体的なニーズを汲み取るというプロセスを経ているわけではないため,Toy Workであることは否めません.しかし,少しでも具体的な課題を設定することによって,戦略教育を受けた学生に世の中に役に立つという意識を強く持ってもらうことを意識しました.
カリキュラムとしての変更点として,今年度はソフトウェアの実習を減らし,簡単な構造設計の講義を追加しました.
それでは2011年度のゼミ生の成果をご覧下さい.
2010年度

2010年度の機械工学ゼミナール(以下ゼミ)では,昨年のテーマを継承しつつ,課題を修正して次のようなミッションを学生に与えました.
「本ゼミナールでは,ロボットによる物体のマニピュレーションについて,実際にロボットを作成しながら考えます.課題はドミノを運搬すること.皆さんのミッションは如何に早く,如何に美しく,そして如何に効率的な方法・機構でドミノを運搬するかの戦略を検討し,それを実装して下さい.物体を早く・確実に操作する戦略に必要なことが何かを一緒に探求しましょう.」
2010年度も物体を操作する(マニピュレーション)することにおける『戦略』の重要性を学部3年のゼミ生と供に議論しました.ドミノを運搬するという抽象的な課題にすることにより,よりバリエーションに溢れる戦略を検討してもらうことを狙いました.また,カリキュラムとして変更されたのは,2010年度はオブジェクト指向スクリプト言語であるPythonを用いてLEGO Mindstorms(TM)を制御する演習を追加しました.
それでは2010年度のゼミ生の成果をご覧下さい.
2009年度

2009年度の協調知能システム研究室の機械工学ゼミナール(以下ゼミ)では,次のようなミッションを学生に与えました.
「本ゼミナールでは,ロボットによる物体のマニピュレーションについて,実際にロボットを作成しながら考えます.課題はドミノを並べること.皆さんのミッションは如何に早く,如何に美しく,そして如何に効率的な方法・機構でドミノを並べるかの戦略を検討し,それを実装して下さい.物体を早く・確実に操作する戦略に必要なことが何かを一緒に探求しましょう.」
これは物体を操作する(マニピュレーション)においては,選択する『戦略』こそがその成否を分けるという,我々の経験から導き出された課題であり,ロボットを学び始めた学部3年生に,その戦略の重要性を体験してもらうことが大切であると考えたからです.さらに戦略をただ考えるのではなく,LEGO Mindstorms(TM)を用いて動作するロボットとして実装することによって,体験してもらうことも重要視しました.
Mindstormsはロボットの製作プラットフォームとして,センサやアクチュエータという意味で,必ずしもパワフルなものではないかもしれません.しかし,そこにしっかりとした戦略の裏付けがあることによって,ドミノを並べるという難しいタスクも実現可能であるということを体感してもらいました.
それでは2009年度のゼミ生の成果をご覧下さい.